In the last article, we discussed the most common type of PLC used in large-scale industries i.e. AB PLC (1756 ControlLogix).
ControlLogix Architecture
Today we will discuss about its architecture.
As seen in the picture, the control system consists of power supply modules, communication module, controller (1756-L55xx), redundancy module, ControlNet communication modules (1756-CNBR), remote IO modules & some other modules like flex IO & AC drive module.
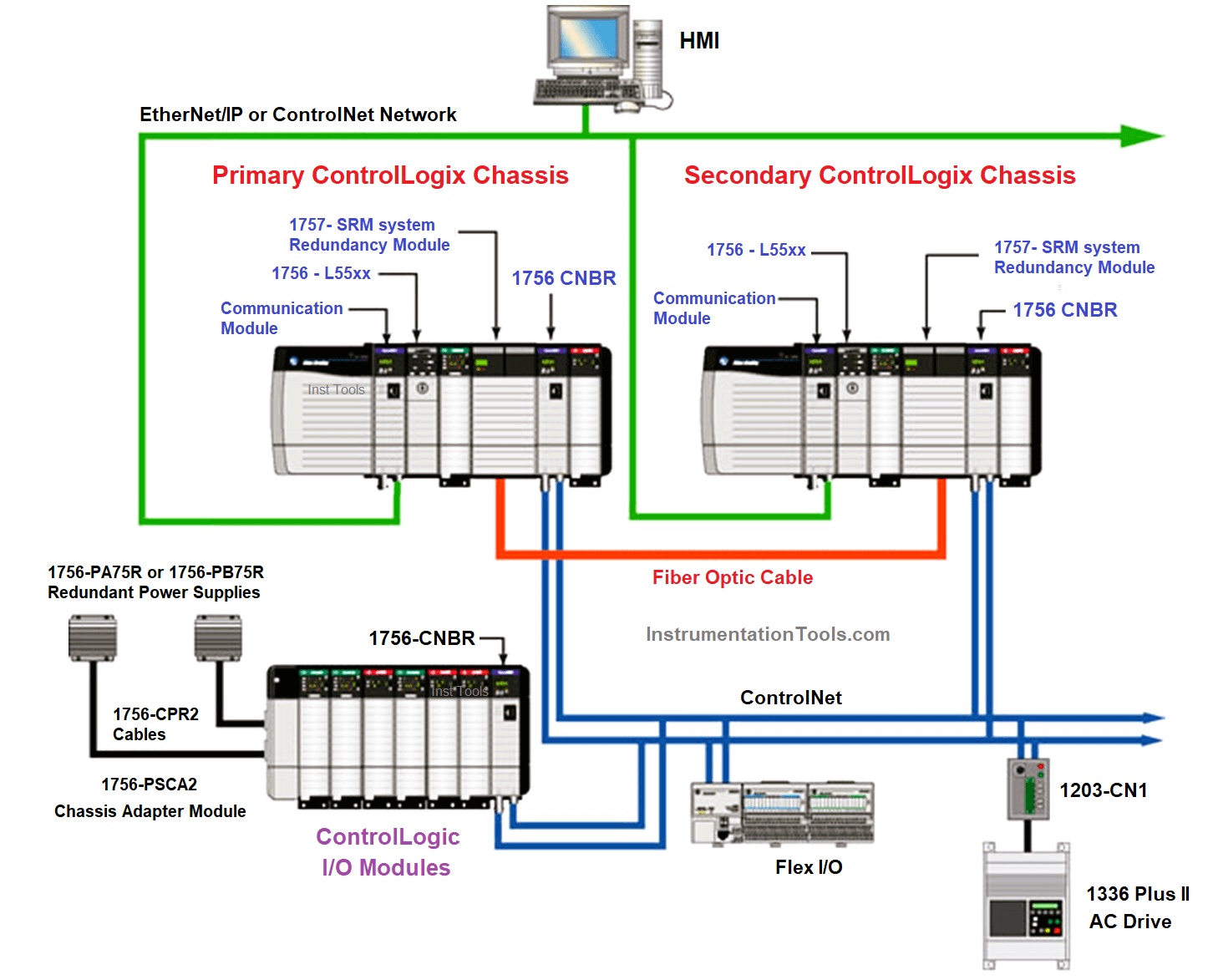
As we are aware that a system has 2 controllers and the system we are talking about here also has 2 controllers installed in 2 different chassis. In the above picture, you can find the primary and secondary ControlLogix chassis.
The controller (CPU) can be identified by a key slot given on it. The CPU has 3 different modes like RUN, REMOTE RUN & PROGRAM.
Redundancy can be established through redundancy modules installed in both chassis connected through Fiber Optic cable. It is shown in the red color line in the above picture.
Once the redundancy modules in the redundant chassis pair are connected and powered, they determine which chassis is the primary chassis and which is the secondary chassis.
There are two PLC systems, we can simply call them PLC A and PLC B, or, chassis A and chassis B. We can also call them the primary controller (PLC A) and secondary controller (PLC B).
Either primary controller or secondary controller will be active and online for monitoring and controlling the plant. The other controller will be in standby mode. The other controller will be active if there is a problem with the primary controller.
If a switchover occurs, the new primary controller continues to execute programs, which begin with the highest-priority task that had been executed on the previous primary controller. The PLC’s switchovers occur as fast as 20 ms.
As we have seen controllers in redundancy, we can place the same IO modules in both chassis to make them redundant too.
Now the system we have taken has IO installed in the remote chassis. So here a 1756-CNBR card is installed in the main chassis and remote IO chassis so that they can communicate.
A redundant type connection or single connection can be used as per requirement (Here redundant is used). Remote IO chassis has separate power modules.
Similarly, different modules like flex IO & AC drive modules can be connected using ControlNet.
We can use Ethernet to communicate with server/HMI, although ControlNet can also be used. The advantage of Ethernet is high bandwidth i.e. 100 Mbps of 1 Gbps depending on the module used whereas ControlNet only gives 5 Mbps bandwidth.
Also, Ethernet is more preferred while having communication with other networks/systems. Other communication modes available are DeviceNet, DH+, DH485, Modbus & SynchLink.
The architecture we discussed is for a single controller used in a very small plant. But if the plant is big and has more areas then more controllers are required.
Also, a network of all controllers is also necessary to access them.
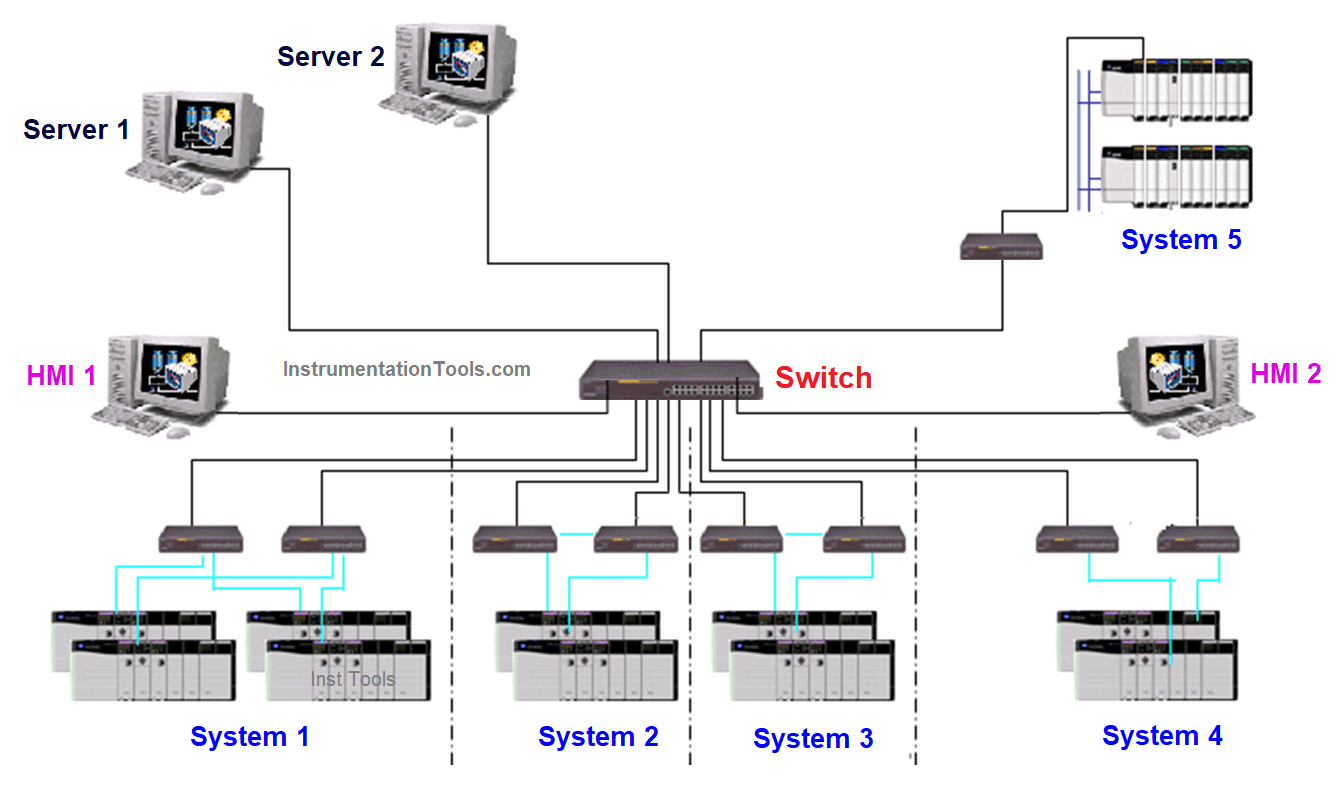
Now if the plant is large with many units in different physical areas and each having its own dedicated PLC, then the above-shown network can be made with the use of switches and Ethernet connection.
This was all about the architecture of AB PLC ControlLogix.
Hope you all enjoyed it.
If you liked this article, then please subscribe to our YouTube Channel for Instrumentation, Electrical, PLC, and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:
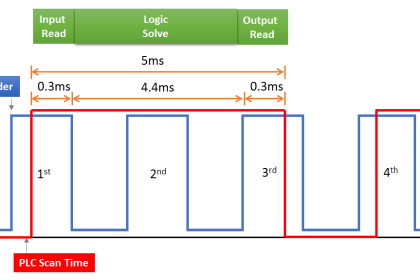
- Scan Cycle in SIEMENS PLC
- Cloud-Based SCADA Projects
- PLC-based Gas Detection System
- Create New Project in Studio 5000
- Rockwell Allen Bradley PLC Projects