Knowing which control actions to focus on first is a matter of characterizing the process (identifying whether it is self-regulating, integrating, runaway, noisy, has lag or dead time, or any combination of these traits based on an open-loop response test (Note1) ) and then selecting the best actions to fit those characteristics.
Note 1 : Recall that an open-loop response test consists of placing the loop controller in manual mode, introducing a step-change to the controller output (manipulated variable), and analyzing the time-domain response of the process variable as it reacts to that perturbation.
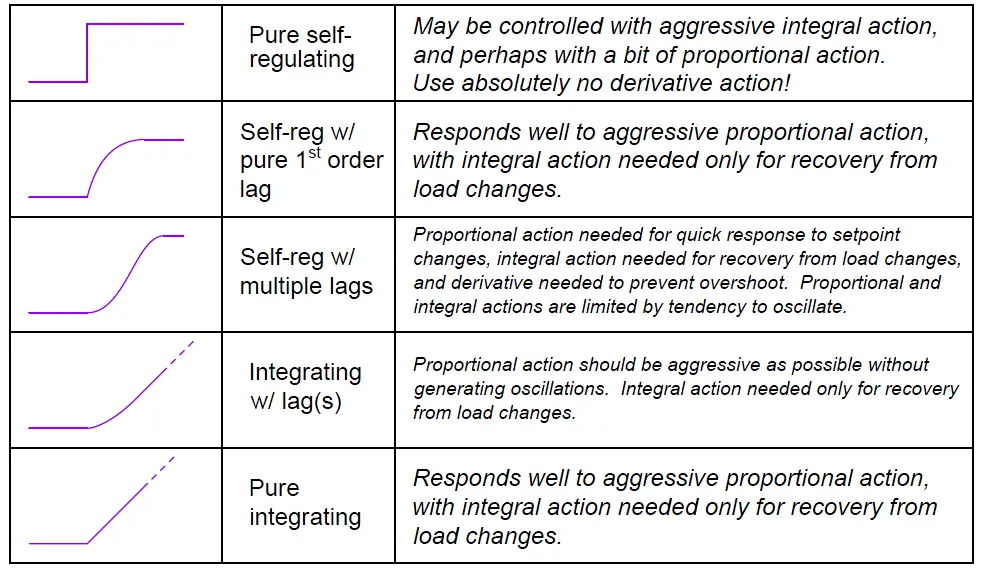
PID Tuning Recommendations
The following table shows some general recommendations for fitting PID tuning to different process characteristics
General rules:
- Use no derivative action if the process signal is “noisy”
- Use proportional action sparingly if the process signal is “noisy”
- The slower the time lag(s), the less integral action to use (a good approximation is to set the integration time τi equal to the measured lag time of the process)
- The higher-order the time lag(s), the less proportional action (gain) to use
- Self-regulating processes need integral action
- Integrating processes need proportional action
- Dead time requires a reduction of all PID constants below what would normally work
Once you have determined the basic character of the process, and understand from that characterization what the needs of the process will be regarding P, I, and/or D control actions, you may “experiment” with different tuning values of P, I, and D until you find a combination yielding robust control.