Before the advent of electronic circuitry, process control was a wholly mechanical endeavor. Facilities used pneumatic control signals where controllers were powered by varying pressures of compressed air.
3 to 15 psi
Ultimately, air compression of 3-15 psi became the standard for a few reasons:
- Very expensive to engineer systems detecting pressure signals under 3 psi
- Signals below 3 psi would be unrecognizable
- Easier to differentiate a live zero (3 psi) signal from a failure in the system (0 psi)
In the 1950s, as electronic systems became less expensive, current input became the preferred and more efficient process control signal. The 4-20 mA range later became the standard for similar reasons as 3-15 psi did.
Introduction
In the world of process control, there are a myriad of different types of process inputs. Thermocouples and RTDs provide direct temperature reading while digital signals such as Modbus® provide exacting control over process variables and display.
Analog signals, where information about the process is transmitted via varying amounts of voltage or current, are the predominant type of input in industries requiring process control today. Of all possible analog signals that can be used to transmit process information, the 4-20 mA loop is, by far, the dominant standard in the industry.
As major as the 4-20 mA loop standard has become in the process control industry, many do not understand the fundamentals of its setup and use. Not knowing the basics could potentially cost you money when it comes time to make decisions about process display and control.
Having a grasp on the history, workings, pros and cons of the 4-20 mA loop will help you to understand why it is the dominant standard for the industry and allow you to make informed decisions about your process control.
What is a 4-20 mA Current Loop?
In order to understand what a 4-20 mA direct current (DC) loop is and how it works, we will need to know a little bit of math. Don’t worry; we won’t be delving into any advanced electrical engineering formulas.
In fact, the formula we need is relatively simple: V = I x R This is Ohm’s Law. What this is saying is that the voltage (V) is equal to the current (I) multiplied by the resistance (R) (“I” stands for Intensité de Courant, French for Current Intensity). This is the fundamental equation in electrical engineering.


Consider the simple DC circuit above, consisting of a power supply and three loads. A current loop requires voltage to drive the current. This is provided by the power 12 supply, with the voltage of the supply labeled as Vtot. Current then flows through the loop, passing through each load. The voltage drop at each load can be calculated from Ohm’s Law. The voltage drop V1 across R1 is: V1 = I x R1
Every element in the loop either provides voltage or has a voltage drop. However, the current, I is the same everywhere in the loop. This is the critical principle of the 4-20 mA loop.
Current is the same in all places throughout the loop. It may be difficult to understand why the current remains constant, so consider your home’s water system as a comparison. There is a certain amount of pressure in the water pipes pushing the water towards your house.
Voltage, in a similar fashion, acts as a pressure, pushing current through the circuit. When a tap inside your home is turned on, there is a subsequent flow of water. The flow of water is analogous to the flow of electrons, or current.
The ability of the pressure to push the water through the pipes is limited by bends and restrictions in the pipe. These restrictions limit the amount of flow in the pipe, similar to how a resistor limits the current.
The flow through the pipe, and likewise the current through the wire, remains constant throughout the system, even though pressure, and likewise voltage, will drop at various points. This is why using current as a means of conveying process information is so reliable.
4-20mA Current Loop
The 4-20 mA current loop is one of the most robust sensor signaling standard. Current loops are ideal for data transmission because of their inherent insensitivity to electrical noise.
In a 4-20 mA current loop, all the signaling current flows through all components; the same current flows even if the wire terminations are less than perfect.
All the components in the loop drop voltage due to the signaling current flowing through them. The signaling current is not affected by these voltage drops as long as the power supply voltage is greater than the sum of the voltage drops around the loop at the maximum signaling current of 20 mA.

Transmitting sensor information via a current loop is particularly useful when the information has to be sent to a remote location over long distances (500 meters, or more).
The loop’s operation is straightforward: a sensor’s output voltage is first converted to a proportional current, with 4 mA normally representing the sensor’s zero-level output, and 20 mA representing the sensor’s full scale output.
Then, a receiver at the remote end converts the 4-20 mA current back into a voltage which in turn can be further processed by a processor/ IO card.
Why Use a Current Loop?
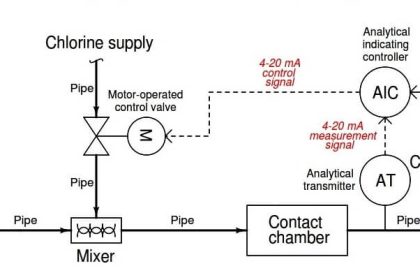
The 4-20mA current loop shown in Figure 1 is a common method of transmitting sensor information in many industrial process-monitoring applications.
A sensor is a device used to measure physical parameters such as temperature, pressure, speed, liquid flow rates, etc. Transmitting sensor information via a current loop is particularly useful when the information has to be sent to a remote location over long distances (1000 feet, or more).
The loop’s operation is straightforward: a sensor’s output voltage is fi rst converted to a proportional current, with 4mA normally representing the sensor’s zero-level output, and 20mA representing the sensor’s full-scale output.
Then, a receiver at the remote end converts the 4-20mA current back into a voltage which in turn can be further processed by a computer or display module.
However, transmitting a sensor’s output as a voltage over long distances has several drawbacks. Unless very high input-impedance devices are used, transmitting voltages over long distances produces correspondingly lower voltages at the receiving end due to wiring and interconnect resistances.
However, high-impedance instruments can be sensitive to noise pickup since the lengthy signal-carrying wires often run in close proximity to other electrically noisy system wiring. Shielded wires can be used to minimize noise pickup, but their high cost may be prohibitive when long distances are involved.
Also Read: Basics of 4-20mA Current Loop
Sending a current over long distances produces voltage losses proportional to the wiring’s length. However, these voltage losses— also known as “loop drops”—do not reduce the 4-20mA current as long as the transmitter and loop supply can compensate for these drops.
The magnitude of the current in the loop is not affected by voltage drops in the system wiring since all of the current (i.e., electrons) originating at the negative (-) terminal of the loop power supply has to return back to its positive (+) terminal—fortunately, electrons cannot easily jump out of wires!
Components of Current Loop
A typical 4-20mA current-loop circuit is made up of four individual elements: a sensor/transducer; a voltage-to-current converter (commonly referred to as a transmitter and/or signal conditioner); a loop power supply; and a receiver/ monitor.
In loop powered applications, all four elements are connected in a closed, series circuit, loop configuration (see Figure 1).

Sensor
First, there needs to be some sort of sensor which measures a process variable. A sensor typically measures temperature, humidity, flow, level or pressure.
The technology that goes into the sensor will vary drastically depending on what exactly it is intended to measure, but this is not relevant for this discussion.
Transmitter
Second, whatever the sensor is monitoring, there needs to be a way to convert its measurement into a current signal, between four and twenty milliamps.
This is where a transmitter will come into play. If, for instance, a sensor was measuring the height of a fifty foot tank, the transmitter would need to translate zero feet as the tank being empty and then transmit a four milliamp signal.
Conversely, it would translate fifty feet as the tank being full and would then transmit a twenty milliamp signal. If the tank were half full the transmitter would signal at the halfway point, or twelve milliamps.
Power Source
In order for a signal to be produced, there needs to be a source of power, just as in the water system analogy there needed to be a source of water pressure.
Remember that the power supply must output a DC current (meaning that the current is only flowing in one direction). There are many common voltages that are used with 4-20 mA current loops (9, 12, 24, etc.) depending on the particular setup.
When deciding on what voltage of power supply to use for your particular setup, be sure to consider that the power supply voltage must be at least 10% greater than the total voltage drop of the attached components (the transmitter, receiver and even wire). The use of improper power supplies can lead to equipment failure.
Loop
In addition to an adequate VDC supply, there also needs to be a loop, which refers to the actual wire connecting the sensor to the device receiving the 4-20 mA signal and then back to the transmitter.
The current signal on the loop is regulated by the transmitter according to the sensor’s measurement. This component is typically overlooked in a current loop setup because wire is so intrinsic to any modern electronic system, but should be considered in our exploration of the fundamentals.
While the wire itself is a source of resistance that causes a voltage drop on the system, it is normally not a concern, as the voltage drop of a section of wire is minuscule. However, over long distances (greater than 1,000 feet) it can add up to a significant amount, depending on the thickness (gauge) of the wire.
Receiver
Finally, at someplace in the loop there will be a device which can receive and interpret the current signal. This current signal must be translated into units that can be easily understood by operators, such as the feet of liquid in a tank or the degrees Celsius of a liquid.
This device also needs to either display the information received (for monitoring purposes) or automatically do something with that information. Digital displays, controllers, actuators, and valves are common devices to incorporate into the loop.
These components are all it takes to complete a 4-20 mA current loop. The sensor measures a process variable, the transmitter translates that measurement into a current signal, the signal travels through a wire loop to a receiver, and the receiver displays or performs an action with that signal.
Pros & Cons of 4-20 mA Loops
Pros
- The 4-20 mA current loop is the dominant standard in many industries.
- It is the simplest option to connect and configure.
- It uses less wiring and connections than other signals, greatly reducing initial setup costs.
- Better for traveling long distances, as current does not degrade over long connections like voltage.
- It is less sensitive to background electrical noise.
- Since 4 mA is equal to 0% output, it is incredibly simple to detect a fault in the system.
Cons
- Current loops can only transmit one particular process signal.
- Multiple loops must be created in situations where there are numerous process variables that require transmission. Running so much wire could lead to problems with ground loops if independent loops are not properly isolated.
- These isolation requirements become exponentially more complicated as the number of loops increases.
Summary
Sensors provide an output voltage whose value represents the physical parameter being measured. (For example, a thermocouple is a type of sensor which provides a very low-level output voltage that is proportional to its ambient temperature.)
The transmitter amplifi es and conditions the sensor’s output, and then converts this voltage to a proportional 4-20mA dc-current that circulates within the closed series-loop.
The receiver/monitor, normally a subsection of a panel meter or data acquisition system, converts the 4-20mA current back into a voltage which can be further processed and/or displayed.

The loop power-supply generally provides all operating power to the transmitter and receiver, and any other loop components that require a well regulated dc voltage. In loop-powered applications, the power supply’s internal elements also furnish a path for closing the series loop.
+24V is still the most widely used power supply voltage in 4-20mA process monitoring (DCS/PLC) applications. This is due to the fact that +24V is also used to power many other instruments and electromechanical components commonly found in industrial environments. Lower supply voltages, such as +12V, are also popular since they are used in computer-based systems.
Also Read: Basics of Analog Current Signals
Loop Drops
One of a process monitor’s (DCS/PLC) most important specifi cations—be it a loop-powered or locally powered device—is the total resistance (or “burden”) it presents to the transmitter’s output driver.
Most transmitter’s data sheets specify the maximum loop resistance the transmitter can drive while still providing a full-scale 20mA output (the worst-case level with regards to loop burden).
Ohm’s Law states that the voltage drop developed across a current-carrying resistor can be found by multiplying the resistor’s value by the current passing through it. Stated in mathematical terms:
E = I x R
where E is the voltage drop in volts, I is the current through the resistor in amperes, and R is the resistor’s value in Ohms (the ‘Ω’ symbol is commonly used to represent Ohms).
The sum of the voltage drops around a series loop has to be equal to the supply voltage. For example, when a loop-powered application is powered from a 24V power source, the sum of all the voltage drops around the series loop has to also equal 24V.
Every component through which the 4-20mA loop current passes develops a maximum voltage drop equal to that component’s resistance multiplied by 0.020 Amperes (20mA). For example, referring to Figure 2 the system resistance yields a maximum loop drop of : 250Ω x 0.020A = 5.0V

Transmitter Ratings
With the above loop-drop theory in mind, and assuming a +24V loop-powered application in which the transmitter’s minimum operating voltage is 8V, and the process monitor (DCS/PLC) drops only 4V, a logical question which arises is what happens to the “extra” 12V? The extra 12V has to be dropped entirely by the transmitter since most process monitors have purely resistive inputs combined with zener diodes that limit their maximum voltage drop.
Transmitters usually state both minimum and maximum operating voltages. The minimum voltage is that which is required to ensure proper transmitter operation, while the maximum voltage is determined by its maximum rated power-dissipation, as well as by its semiconductors’ breakdown ratings.
A transmitter’s power dissipation can be determined by multiplying its loop drop by the highest anticipated output current, usually, but not always, 20mA. For example, if a transmitter drops 30V at an over-range output level of 30mA, its power dissipation is:
30V x 0.030A = 0.9 watts
Wiring Resistance
Because copper wires exhibit a dc-resistance directly proportional to their length and gauge (diameter), this application note would not be complete without discussing the important topic of wiring—specifically the effects wiring resistance has on overall system performance.
Applications in which two or more loop-monitoring devices are connected over very long, 2-way wiring distances (1000-2000 feet) normally use +24V supplies because many transmitters require a minimum 8V-supply for proper operation.
When this 8-volt minimum is added to the typical 3-4 volts dropped by each process monitor and the 2-4 volts dropped in the system wiring and interconnects, the required minimum supply voltage can easily exceed 16V. The following worked-out example will illustrate these important concepts
The voltage drop developed along a given length of wire is found by multiplying the wire’s total resistance by the current passing through it. The wire’s total resistance is found by looking up its resistance (usually expressed in Ohms per 1000 feet) in a wire specifications table.
Referring to Figure 3 if a transmitter’s output is delivered to a remote process monitor using 2000 feet (660 meters) of 26-guage, solid copper wire having a resistance of 40.8Ω per 1000 feet, the one-way voltage dropped by the wire when the transmitter’s output is 20mA is equal to:
E = 0.020 Amperes x [2000 feet x (40.8Ω /1000 feet)]
E = 0.020A x 81.6Ω = 1.63V
However, the current must travel 2000 feet down to the process monitor and another 2000 feet back to the transmitter’s “+” output terminal, for a total of 4000 feet.
As noted above, 26-gauge wire has a resistance of 40.8Ω per 1000 feet, yielding a total loop resistance (R) equal to 4000 feet x (40.8Ω /1000 feet) = 163.2Ω. The total voltage dropped over the 4000 feet of wiring is therefore:
E = 0.020A x 163.2Ω
E = 3.27V
Looking down the loop towards the remote process monitor, the transmitter sees the sum of the 3.27V wire drop and the 5.0V process-monitor drop, for a total loop-drop of 8.27V.
If the transmitter itself requires a minimum of 8V (this is also considered a voltage drop) for proper operation, the lowest power supply voltage required for the system shown in Figure 3 is 16.3V.

Conclusion
The 4-20 mA current loop is the prevailing process control signal in many industries. It is an ideal method of transferring process information because current does not change as it travels from transmitter to receiver.
It is also much simpler and cost effective. However, voltage drops and the number of process variables that need to be monitored can impact its cost and complexity.
By knowing these fundamentals you will be able to make more informed decisions about process control in your facility which could affect your bottom line.
Also Read: Understanding a Process Control Loop
If you liked this article, then please subscribe to our YouTube Channel for PLC and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:






What’s the differences among these 3 terms
Sensor
Transducer
Detector
Sensor : A sensor is a device that measures a physical quantity and converts it into a ‘signal’ which can be read by an observer or by an instrument. For example, a mercury thermometer converts the measured temperature into the expansion and contraction of a liquid which can be read on a calibrated glass tube. Actually Sensor Output may be interms of Resistance, Capacitance, Inducatance, millivolts etc… depends on type of sensor.
Transducer : A transducer is an electronic device that converts energy from one form to another. Actually transducer converts any type of sensor output into standard electrical signal.
Detector : Its also an one type of transducer.
dear sir,
please tell me about isolator working principle
Very good job
Sir,
Can u plz elaborate on the way the 12V is taken care of?
If i measure the potential across the transmitter,will it show 8 or 12V
Hello Devraj, Here in this article we considered maximum voltage drops that may be observed for a loop. Also Transmitters are microcontroller based devices so minimum 5 to 8 volts required for operation. Practically when we observe in field we may found around 18volts voltage readings (considered voltage drop). Also Remember voltage drop may change from transmitter to transmitter.
Sir,
Please tell me that why voltage gets corrupted easily by noise ?
And what is the ground loop and why grounding is so important?
Sir’ why 0 to 20mA is not used as transmitter Output for measurement?