A very common control scheme is split range control in which the output of a controller is split to two or more control valves.
Split Range Control
For example:
- Controller output 0% Valve A is fully open and Valve B fully closed.
- Controller output 25% Valve A is 75% open and Valve B 25% open.
- Controller output 50% Both valves are 50% open.
- Controller output 75% Valve A is 25% open and Valve B 75% open.
- Controller output 100% Valve A is fully closed and Valve B fully open.
Different arrangements are possible. For example, figure 1 shows a split range pressure controller on a separator with two valves, one to the flare and one to the compressor suction. In this case, the ‘split’ is configured as follows:
- Controller output 0% Both valves are closed.
- Controller output 25% Valve A is 50% open and Valve B still closed.
- Controller output 50% Valve A is fully open and Valve B closed.
- Controller output 75% Valve A is fully open and Valve B 50% open.
- Controller output 100% Both valves are fully open.
The idea is that the suction valve is used for normal pressure control while the flare valve only opens to disperse high pressures.
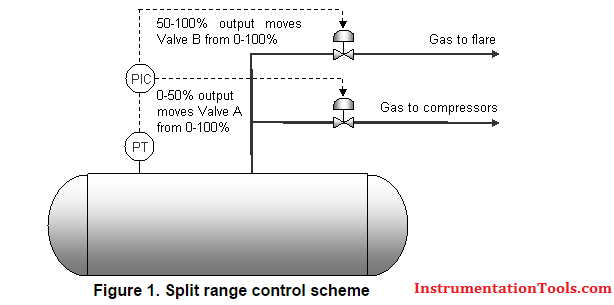
In this application, the flare valve will need to open quickly in response to high pressures, but the compressor suction valve will need to move much more slowly to prevent instability in the compressors.
The main problem with split range control is that the controller only has one set of tuning parameters. If the controller is tuned to be fast acting to optimize the performance of the flare valve, the suction valve will also move rapidly to produce unstable gas flows to the compressors.
If the controller is tuned slower to stabilize the compressors, then the flare valve will not open fast enough as the pressure rises. A further issue is that the process response of the route to flare generally differs to the process response of the route to the compressors, so both routes will anyway require very different tuning for optimal control.
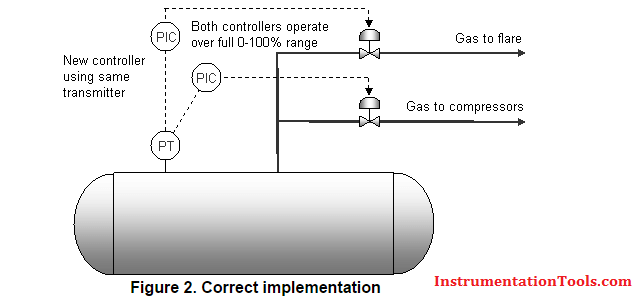
The solution is to replace the split range controller with two independent controllers, both reading the same pressure transmitter, but one controlling the flare valve and the other the suction valve.
Not only can each controller be tuned correctly for its dedicated service, but different setpoints can also be used to prevent the flare valve from ‘popping’ unnecessarily.
The ease with which a split range controller can be replaced with two ordinary controllers depends on a number of factors. If the ‘split’ is calculated in the DCS or PLC so that each valve has its own output from the control system, then the addition of a new controller is simply a matter of software configuration.
However, occasionally, the control system only has one output wired to both controllers and the ‘split’ produced by configuration of the valve positioner. A new output will then be required from the control system to one of the valves and the valve positioners must be reconfigured to operate over the full 0-100% output range.
Also Read: Use of Diode Protection Module
This is an excellent article which has given me an good explanation. Thanks
MANY THANX
Good knowledge and more effective for all concerned person
Very good lecture information and technical concept of instrumentation. I feel proud of the team because as Instrument Technician we play a very important role in maintain /control/ troubleshoot the processing plants.
all topics in instrumentation tools.com is very useful for instrumentation engineering students.
thank you