A system is adaptable when changing behavior according to new circumstances or changes in the environment.
An adaptive controller is a sort of controller, which can modify its behavior in response to changes in the dynamics of the system and process disturbances.
Adaptive Control Concept
There are many definitions of adaptive control, one of the most accepted is that it is a type of non-linear special control system in which the state of the process can be separated on two-time scales that evolve at different speeds.
There are many types of controllers that provide good regulation characteristics in the presence of changes in the system parameters. But according to the above definition, they are not really adaptive, since that the adaptation is done in an open loop.
The below figure shows a general schematic of an adaptive controller. Three phases go into the design of a modern controller. The modeling of the system, the identification of the parameters of the model, and finally the design of the controller.
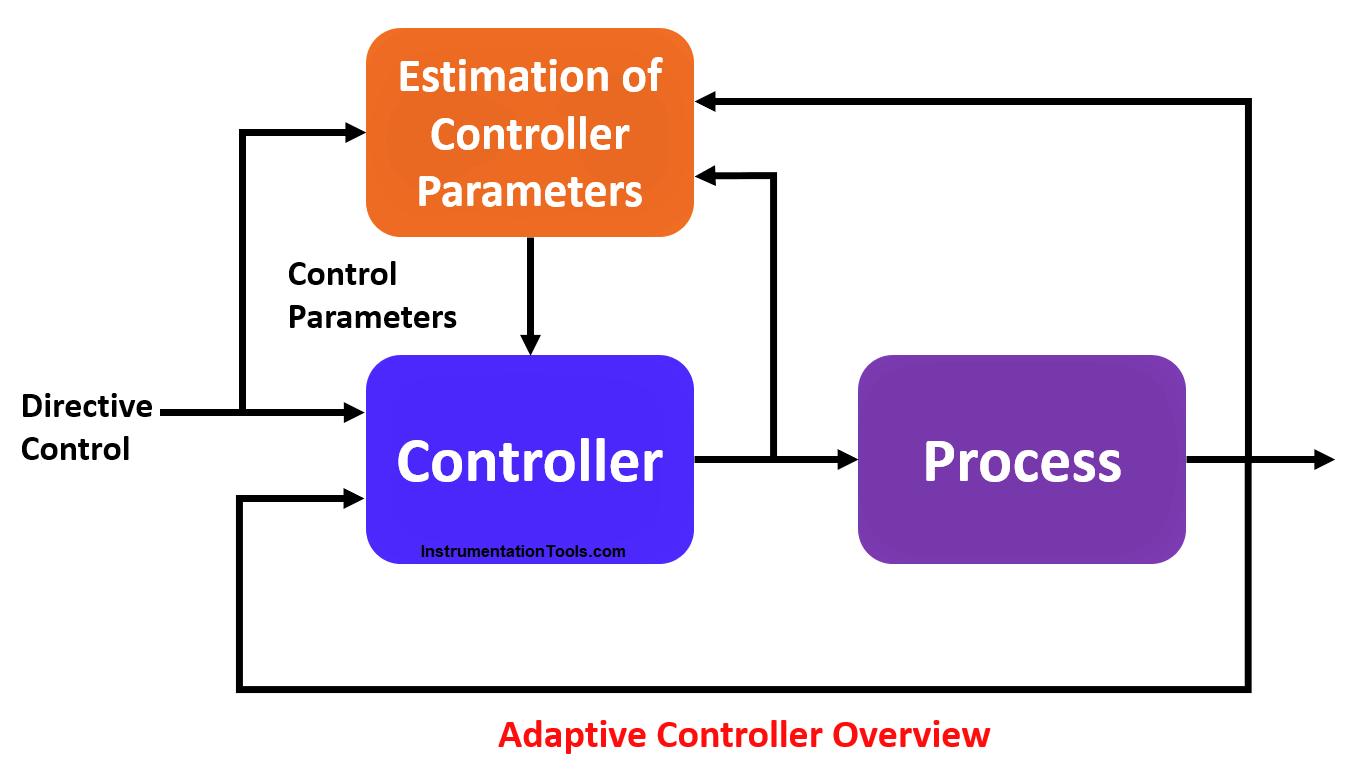
Adaptive systems, in general, allow automating the last two stages, although the controllers used in adaptive systems can be linear.
For example, PID-type controllers, of minimum variance, predictive, etc., when combined with the laws of parameter adjustment, the entire system becomes a nonlinear system. Therefore, all stability analyses must be carried out with techniques applicable to non-linear systems.
Adaptive control relates to a control procedure and is used by a controller that must adapt to a controlled system with deviating or uncertain parameters.
An adaptive control system detects the changes in the performance of the process and automatically regulates the controlling parameters. This is required to compensate for the changing process conditions. At last, its job is to optimize the loop response.
What is Adaptive Control?
Specifically, adaptive control is a set of techniques that allow the value of the control parameters to be adjusted in real-time, allowing good monitoring of the controlled variables even if the plant parameters are unknown or change over time.
This control is a special type of non-linear control, and the process can be separated into two-time scales: fast time (feedback loop) and slow-time (variation of the control parameters, which affects the automatisms).
Adaptive control and its applications in industry – Structure of Adaptive Control
Why an adaptive control and not a conventional one?
Conventional controllers are designed to adjust linear and time-invariant (LTI) systems. This approximation is true for fixed points of operation with small disturbances.
When this approximation is no longer true, the performance of conventional controllers is no longer good. Adaptive control, on the other hand, is capable of adapting by changing its control parameters, maintaining and continuation of good control of the process.
Adaptive control is a method in which the response of a controller changes automatically based on changes in conditions within the process.
An adaptive controller contains a small computer that is programmed to change the response of the controller when an error is not correct. Adaptive control gets its name from the controller’s ability to adapt its response to changing conditions.
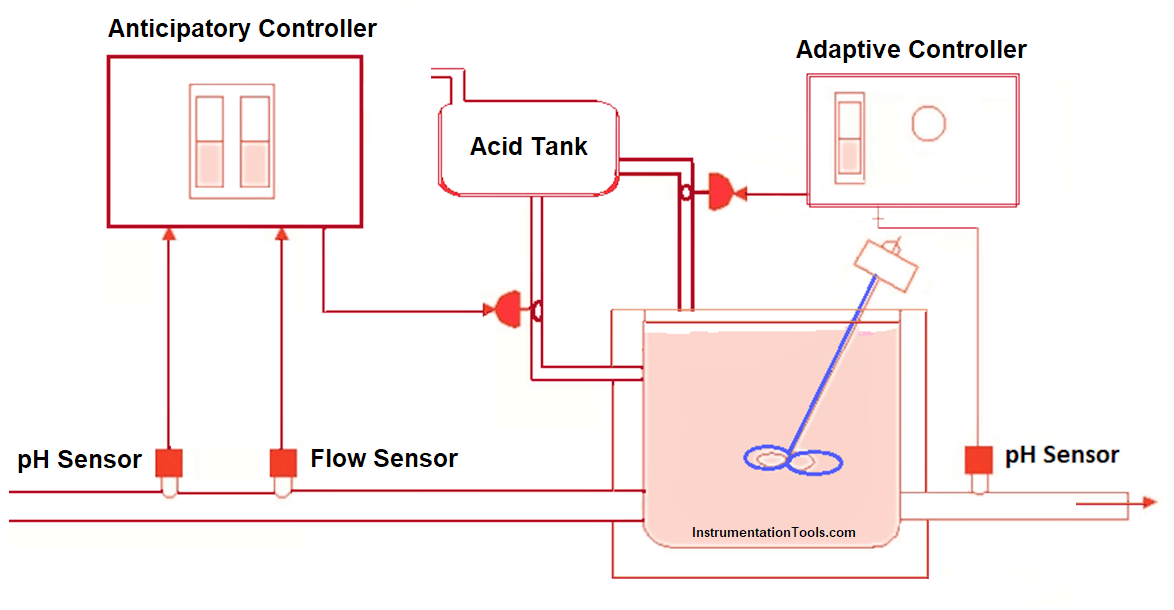
Adaptive control is typically used in situations where process gain is not linear, such as pH control.
Adaptive control is one that adapts to dynamic changes in the plant over time. There are different techniques to apply this type of control, which can be classified into two large groups,
Classification of Adaptive Control Systems
There are two types of adaptive control systems available. They are
- Indirect Adaptive Control
- Direct Adaptive Control
Indirect Adaptive Control
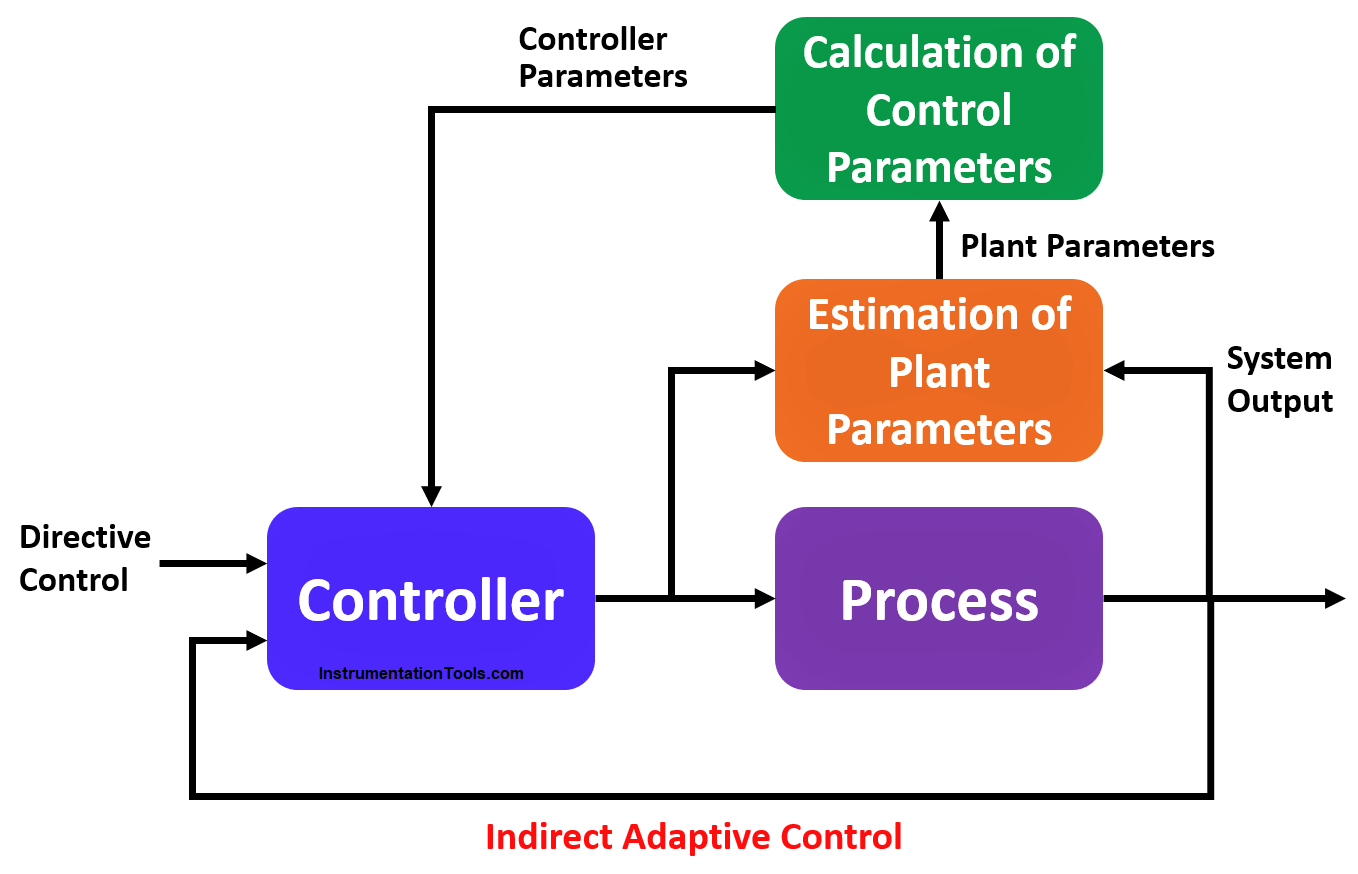
The parameter adjustment mechanism is applied to obtain an estimate of the parameters of a system model.
Based on the assumption that the process parameters are good, the controller parameters are obtained as a solution to a design problem using the estimated parameters.
In this case, a mechanism for estimating plant parameters can be distinguished.
Direct Adaptive Control
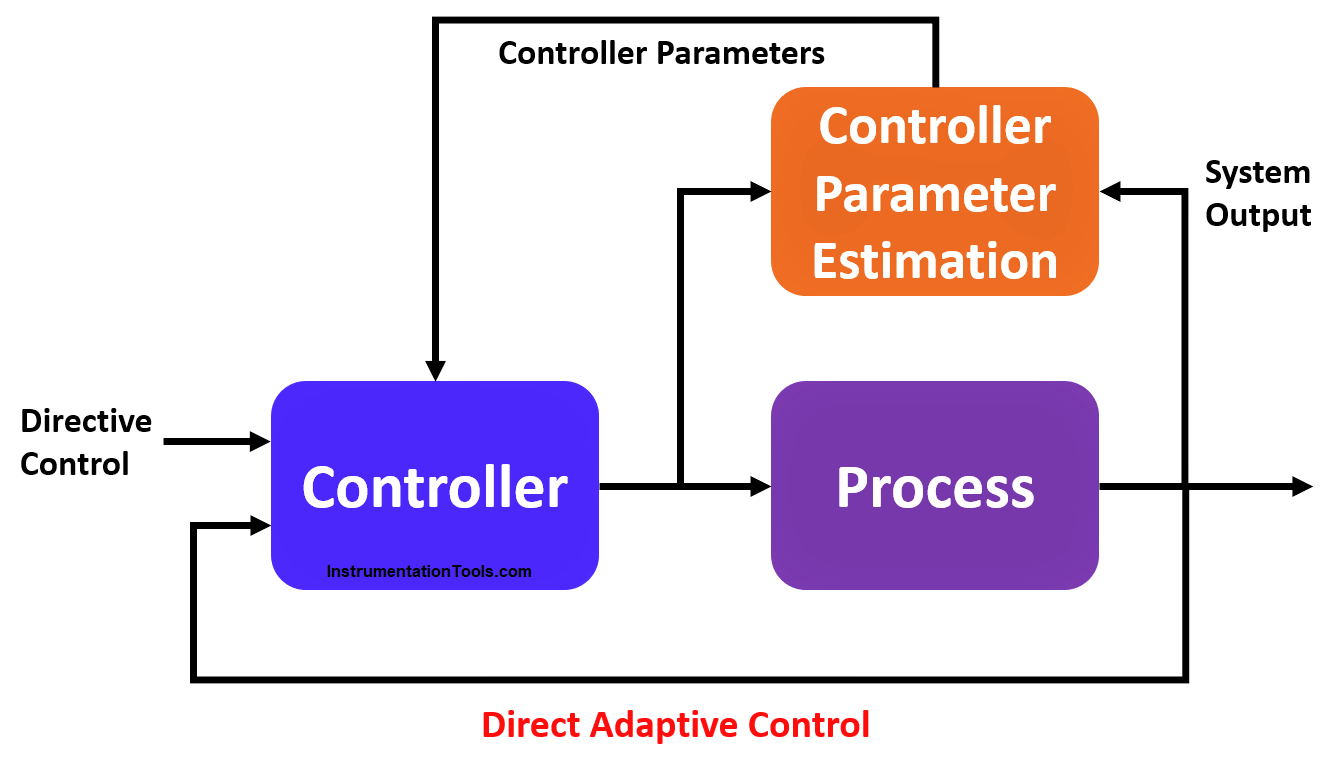
The parameter setting mechanism, directly indicates in which form the controller parameters should be set. This implies that the controller parameters must be parameterized in terms of the system model parameters.
It should be noted that direct adaptive schemes require certain properties of the plant to which it is to be applied, whereas indirect schemes are more generally applicable, that different identification methods can be applied and based on the parameters obtained, design a specific controller.
Historically, indirect methods are considered to correspond to self-tuning regulators (Self Tuning Regulator) and direct schemes to regulators with a reference model (Model Reference Adaptive Control). Currently, this separation is not so sharp. Another terminology used for this separation is that of explicit (indirect) and implicit (direct) adaptive controllers.







Very wonderful, informative article.