Here is the complete list of PID Controllers Questions and Answers, PLC Engineers Interview Questions, DCS Engineers Interview Questions and Industrial Automation Engineers Interview Questions.
PID Controller Questions

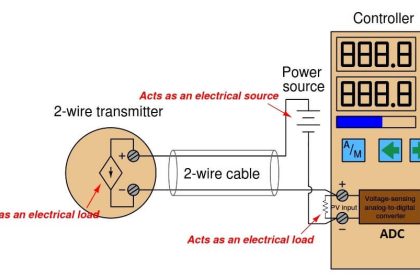
1.What is a ‘controller’? Where are its application areas?
A controller is an instrument used for controlling a process variable (measurement). Its continuously monitors the error signal and gives a corrective output to the final control element.
2.Explain the following terms in a controller?
Measurement variable: It is the demand variable measured and controlled.
Desired Variable: it is the demand signal (setpoint) to which the process variable is controlled.
Deviation: it is the error signal caused by the difference between the measurement and the demand signal.
Output: It is the corrective signal from the controller to the final control element.
3.Explain what is ‘direct action’ and ‘reverse action’ on a controller?
Direct action :
In a direct acting controller, the output increases when the process measurement (variable) increases.
Reverse action :
In a reverse action controller, the output decreases when the process measurement (variable) increases.
4.What is a gap controller?
A controller whose output changes from minimum to maximum (on-off) and vice-versa when the error signal (deviation) exceeds the set gap depending on the controller action.
5.What is a ‘proportional band’? Explain with an example?
It is the range in percentage for which the controller output changes proportionally from minimum to maximum and vice-versa when the measurement deviates from the setpoint.
For example: A controller set at 50% proportional band
The controller output changes from minimum to maximum and vice-versa when the measurement exceeds 25% either side of the setpoint depending on the controller action.
6.What is a ‘gain’? Write the relation (formula) between a gain and proportional band?
A controller ‘gain’ is inversely proportional to its proportional band.
. g = (1/p)*100
. g = gain
. P = proportional band
7.What is a ‘reset action’? Explain with an example?
Reset action in a controller is the integration of the proportional action by the set period. The reset action repeats the proportional action’s output per the reset time set, until the error signal becomes zero or the output gets saturated.
For example :if the reset action is set for 30 sec.
For a 0.5 volt correction output ;by the proportional action will be repeated by the reset action every 30 secs., until the error signal becomes zero or the output gets saturated.
8.What is a ‘batch’ facility on a controller?
Whenever a deviation persists for a long time the controller output saturates at the maximum of minimum output (-2.5 VDC or + 12.5 VDC/0 kPa or 140 kPa) depending on the controller action. In a normal controller when the process reverts to normal the output takes its time to come into control range.
In a batch controller the output reverts to the control limit (0VDC OR 10.00V DC 20 kPa or 100 kPa) as soon as the deviation enters the batch limits
9.What will be the output (increases or decreases) of a direct action controller when the process goes above the setpoint?
In a direct acting controller, the controller output increases when the process (measurement) goes above the setpoint)
10.What will be the output of a reverse acting controller when the process changes from 50% to 75% where the proportional band is set at 50%, setpoint is set at 50%?
The controller output will be zero.
11.What is a ‘bump-less transfer’ in a controller’s auto/manual change over?
‘Bump-less transfer’ is to eliminate the change in the controller’s output when the controller is changed from auto to manual control and vice-versa.
12.Explain how to change a controller from auto to manual and vise-versa?
Pneumatic controllers :
While taking the controller from auto to manual, the manual output is to be balanced to the auto output and then transfer the auto-manual switch to manual.
While changing the controller from manual to auto, the controller setpoint is matched to the manual output and then auto-manual switch is transferred.
Electronic controllers :
Auto to manual control may be transferred directly as the electronic circuit keeps the auto and manual output matched.
But while changing the controller from manual to auto, the controller setpoint is to match to the process variable and then auto-manual switch is transferred.
13.What type of controller (P, PI, PID) is preferred on the following process control loops?
Pressure :
If the load change is minimum, then a proportional controller is suitable. If a frequent load change is expected then a Proportional + Integral controller is preferred.
Level :
Normally a proportional controller is preferred.
Flow :
Proportional + Integral controller is preferred
Temperature :
Proportional + Integral + Derivative controller is preferred
14.Why is there a direct and reverse action on a controller when the control valves are already having direct (air fail to close)/reverse(air fail to open) actions”?
The type of control valve action requirement on a process line, depends on the protection required on the upstream or downstream of the control valve incase of an air failure.
Depending on the control valve action, the controller action has to be set to control the process.
For example :
Station back pressure control valve is reverse acting and its controller is set for reverse acting. If there is an air failure the control valve opens fully and prevents the separator from high pressure.
If the separator gas pressure goes below the setpoint the controller output goes high and keeps the control valve closed.
Separator level control valve is direct acting and its controller is set for direct acting. If ;there is an air failure, the control valve closes fully and prevents the surge tank from high pressure.
If the separator level goes below the setpoint the controller output goes low and keeps the control valve closed.
Articles You May Like :
Process Control Questions & Answers
PID Controller Multiple Choice Questions
Feedback Control Loop Questions & Answers
Why Offset in Proportional Controller ?




It’s of great gain to me.
I give u three stars