Proportional controller: With proportional band, the controller output changes in “proportion” to the error between process variable and set point. The amplitude of the change is adjustable from 1% to 999.9%. This range may differ from vendor to vendor.
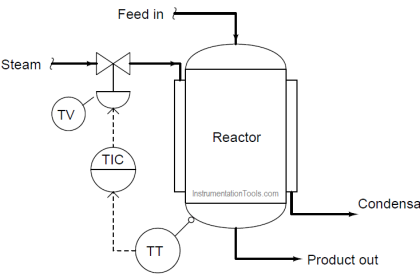
Refer to Figure 1 below. The example of a temperature controller shows a proportional band setting of 5%.
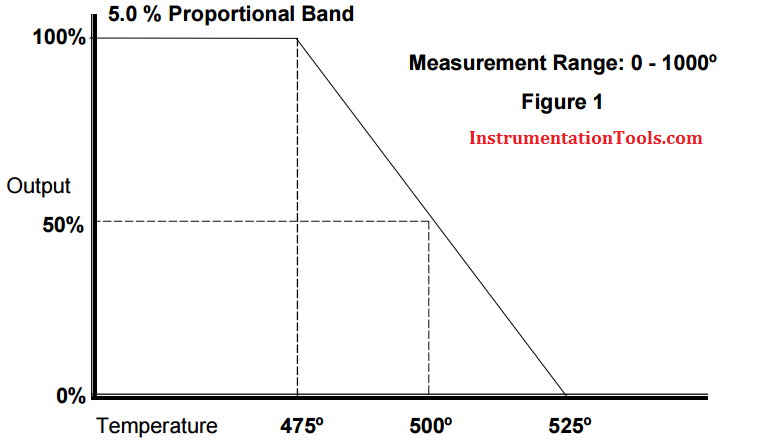
Set point = 500°
Measurement range = 0-1000°
5% PB = 5% of 1000° = 50°
100% output at 475° (2.5% of 1000°)
0% output at 525° (2.5% of 1000°)
If the process variable equals the set point (500°), there is a 50% output. As the temperature decreases, the proportional band increases the output linearly toward 100% as the temperature falls toward 475°. The output decreases below 50% as the temperature rises toward 525°.
In this example, a small change in temperature provides a large change in output. If the setting is too small for the process dynamics, oscillations will occur and will not settle at set point. A large PB setting makes the controller act sluggish and will not respond adequately to upsets.
Since proportional control does not incorporate the time that the error has existed, there will always be an offset from set point.
Typically, flow or pressure controllers have a much larger proportional setting due to a possible narrower measurement range and fast process reaction to a change in the control output.
OFFSET
Whenever a process load change occurs and makes the process deviate from the steady state condition, the controller will respond and limit the excursion of the controlled variable.
For this to occur, and error must develop, because, for the controller output (CO) to be at a value other than the bias (b), there must be an error, and so, if the load change continues, so will the error.
This sustained error due to the existence of a continuing process load change in a process controlled by a proportional only controller is termed offset.
Control systems may also experience changes in setpoint, which are called setpoint load changes. Integrating and nonintegrating processes respond differently to these setpoint load changes under proportional control.
Non-integrating processes will experience offsets due to setpoint lead changes while integrating processes will not.
Integral controller will be used to reduce this offset error. click here to the article.







It is a matter of mathematics. When a Proportional-only controller is switched from Manual to Automatic, we would like for the process to not suddenly change – we call that bumpless transfer. Before the operator makes that switch, the control valve was adjusted by the operator to a position that is satisfactory to running the process. The equation for Proportional-only control is:
M = Kp * (PV-SP) + B
where: M is the control valve position
Kp is the Proportional tuning constant
PV is the process variable
SP is the setpoint
B is a bias
When the switch to Auto occurs, in order for bumpless transfer to occur, the B term will have a value of the control valve position since by definition, SP=PV, or zero error.
Then, for any other value of PV, there will be an error value, and a new value of M will be calculated, but since the B term was set for the initial conditions, M will not be at the right value for zero error.
Proportional controller works purely on existing error signal.So you always need a measurable error signal to generate an effective output signal.Therefore, there will always be an offset exists in control variable. By increasing gain one can reduce the offset,but this also leads to system oscillation.