Top PID Controller Multiple Choice Questions and answers for industrial automation engineers and control system engineers.
PID Controllers Multiple Choice Questions
Question 1
The derivative control action is typically used when controlling, but rarely used when controlling.
(A) Temperature, Flow
(B) Flow, Level
(C) pH, Temperature
(D) Level, Temperature
(E) Level, Flow
Answer : A
Question 2
processes always require some degree of control action to achieve setpoint.
(A) Integrating, Derivative
(B) Integrating, Feedforward
(C) Self-regulating, Proportional
(D) Runaway, Linear
(E) Self-regulating, Integral
Answer : E
Question 3
The reciprocal of proportional band is called:
(A) Reset
(B) Percent
(C) Minutes per repeat
(D) Gain
(E) Rate
Answer : D
Question 4
“Quarter-wave damping” may be described as:
(A) a condition of good control where PV approaches SP without overshoot
(B) a condition of poor control where oscillations continue at constant amplitude
(C) a condition of poor control where the transmitter is damped by 25%
(D) a condition of good control where oscillations quickly subside
(E) a condition of excellent control where there are no oscillations
Answer : D
Question 5
Reset control action is often expressed in units of:
(A) percent
(B) seconds per rate
(C) minutes
(D) time constant ratio (unitless)
(E) repeats per minute
Answer : E
Question 6
A proportional band setting of 175% is equivalent to a gain setting of .
(A) 175
(B) 0.756
(C) 0.571
(D) 1.32
(E) 1.75
Answer : C
Question 7
The open-loop response of a process is shown in the following trend. What sort of process is indicated by this behavior?
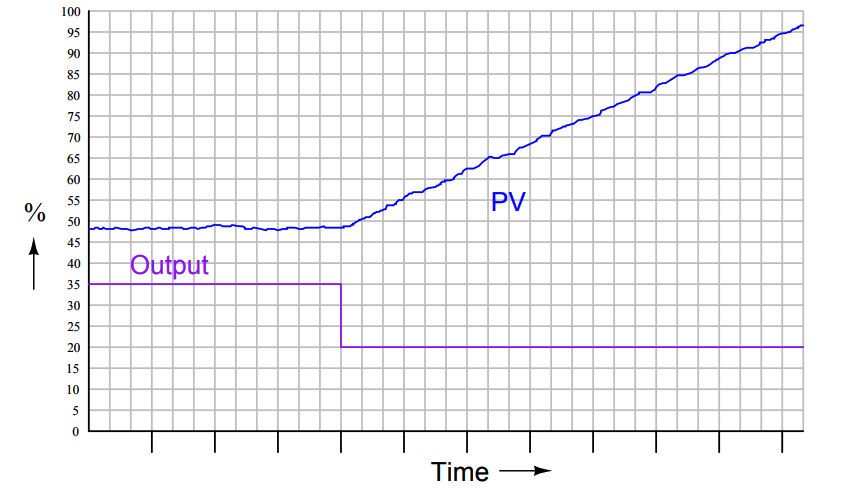
(A) Integrating
(B) Proportional
(C) Linear
(D) Direct-acting
(E) Self-regulating
Answer : A
Question 8
A condition where integral control action drives the output of a controller into saturation is called:
(A) self-bias
(B) wind-up
(C) repeat
(D) noise
(E) offset
Answer : B
Question 9
Fast, self-regulating processes typically respond well to aggressive control action.
(A) Nonlinear
(B) Derivative
(C) Proportional
(D) Reset
(E) Gain
Answer : D
Question 10
Process variable filtering should be used:
(A) to dampen noise
(B) only on integrating processes
(C) to improve response time
(D) only on self-regulating processes
(E) never
Answer : A
Credits : by Tony R. Kuphaldt