Feedback Control Loop Questions & Answers
1. With adequate gain and inphase feedback any system will:
a. Drift
b. Oscillate
c. Increase amplitude
d. Degenerate
Answer: b
2. The natural frequency at which a closed-loop system will cycle depends upon:
a. The amplifier gain
b. The attenuation provided by the process
c. The phase shift provided by the resistance-capacitance and dead time networks that exist in the system
d. Resonance
Answer: c
3. The Bode diagram describes:
a. Gain and phase shift through the usable frequency range
b. The system’s linearity
c. The reaction to a step change
d. The recovery curve that will result from a load change
Answer: a
4. All systems may be assumed to be:
a. Linear
b. Nonlinear
c. Linear for the purpose of initial consideration but with full knowledge that this may not be the case
d. Nonlinear for purposes of analysis with the exception that the system may prove to be linear
Answer: c
5. A closed-loop control system that employs a three-mode controller:
a. Can oscillate or cycle at only one frequency
b. Can oscillate or cycle at several frequencies. depending on controller adjustment
c. Will not oscillate because of the stability provided by derivative
d. Will produce only damped oscillations with a 0.25 damping ratio
Answer: b
6. We have a closed-loop control system which is cycling. We should:
a. Increase the proportional band
b. Increase integral action
c. Check and adjust both
d. Immediately shut it down
Answer: c
7. A proportional controller is being used to control a process and the offset between set point and control point must be held to a minimum. This would dictate that the proportional band
a. Be as narrow as possible
b. Be as wide as possible
c. Be of moderate value
d. Does not relate to the problem
Answer: a
8. The system gain of the closed-loop control system:
a. Refers to the process gain
b. Refers to the gain of the measurement and control devices
c. Refers to the total gain of all components. including measurement, controller, valve operator, valve, and process
d. Relates only to the gain of the controller
Answer: b
9. If a closed-loop control system employs a straight proportional controller and is under good control. offset:
a. Will vary in magnitude
b. Will not exceed one-half of the proportional bandwidth
c. Will exceed the deviation
d. Is repeated with each reset
Answer: b
10. Any closed-loop system with in-phase feedback and a gain of one or more will:
a. Degenerate
b. Cycle or oscillate
c. Exhibit a 0.25 damping ratio
d. Produce square waves
Answer: b
11. If a closed-loop control system is adjusted to produce a 0.25 damping ratio when subjected to a step change, the system gain is:
a. 0.1
b. 0.25
c. 0.5
d. 1.0
Answer: c
12. A straight proportional controller is employed to control a process of Narrowing the proportional band will:
a. Not change the offset
b. Decrease the offset
c. Always cause cycling
d. Never cause cycling
Answer: b
13. The type of process that most often can benefit from derivative is:
a. Flow
b. Level
c. Temperature
d. Pressure
Answer: c
14. Pure dead time in a process contributes a gain or:
a. Zero
b. Infinite
c. Depends upon dynamics
d. One
Answer: d
15. Referring to Figure, the transmitter span is 200 °F; the controller proportional band is adjusted to 150 percent; the equal percentage valve delivers saturated steam containing 40,000 Btu per minute at full open; and water enters the exchanger at 50°F and is heated to 200 DegF at a 40 gpm maximum flow rate. The static gain of this control loop is approximately:
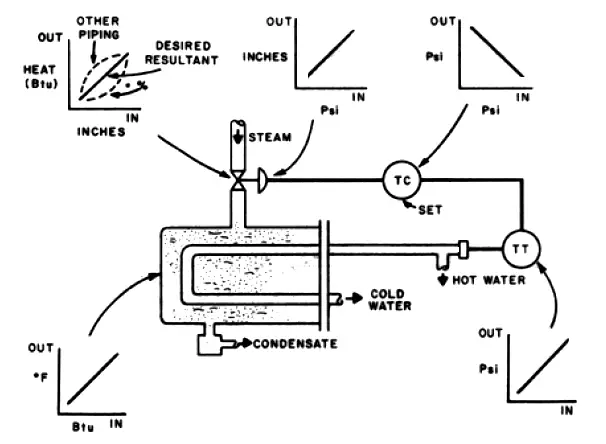
Fig : Responsec haracteristicso Ce ache lementi n a Ceedbaccko ntrolloop-heat, exchangepr rocesso
a. 0.5
b. 1.0
c. 1.5
d. 2.0
Answer: a
16. The integral control mode is:
a. Phase-Ieading
b. Phase-Iagging
c. Inphase
d. Phase-reversing
Answer: b
17. The derivative control mode is
a. Phase-Ieading
b. Phase-Iagging
c. Inphase
d. Phase-reversing
Answer: a
18. The most common combination of control modes found in the typical process plant is:
a. Proportional-only
b. Proportional, integral, and derivative
c. Proportional-plus-integral
d. On/off
Answer: c