Modbus communication of delta PLC (DVP 14SS2) with delta VFD (VFD-L series). The motor is to be run directly from HMI (DOP-107CV) using Modbus communication.
Delta PLC and VFD Modbus Communication
- The induction motor is to be run directly from HMI along with its speed control. Speed control is such that there should be two buttons in HMI that increase and decreases the speed of the motor by steps of one hertz (assume).
- There is a VFD-L series delta AC drive which will run the motor based on the commands received from PLC.
- Firstly, communication and other parameters need to be set in the drive matching all its configurations with the PLC such as baud rate, parity, communication mode, etc; except the slave ID (station address) which must be different from the PLC station address. By default, the PLC station address is equal to one (1). This means the station address of the drive must be anything in its defined range other than one (1).
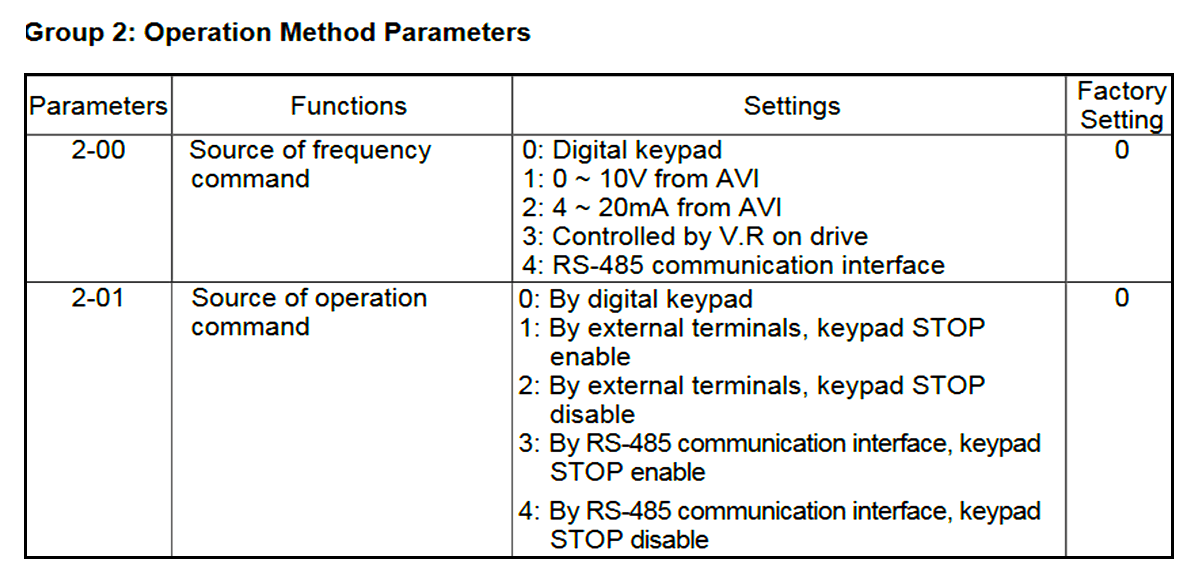
The detailed parameters to be set for the communication mode are as follows:
- 2-00 = 4
- 2-01 = 4
Communication Parameters
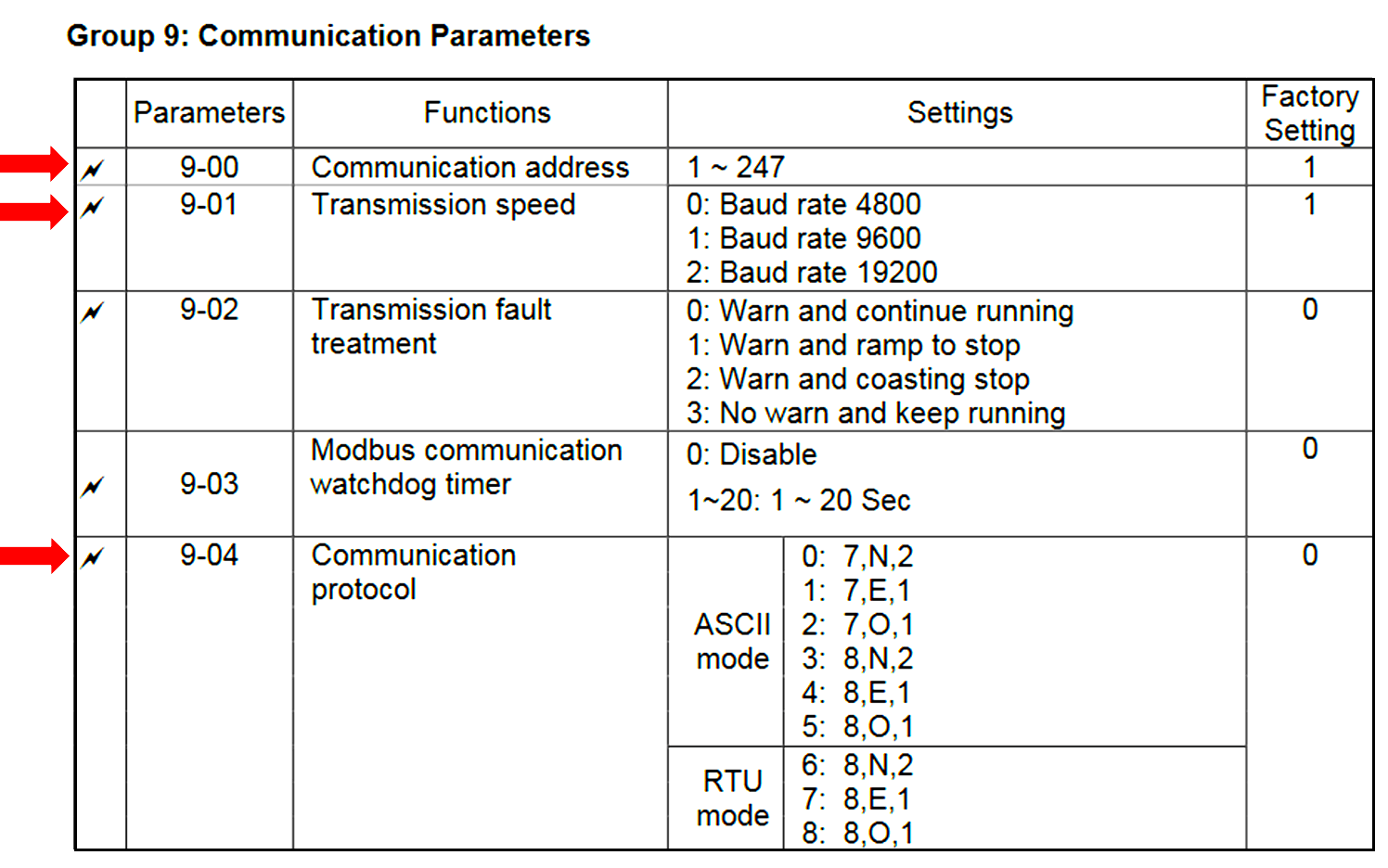
We have to set the communication parameters as per the above table. (taken from manual).
- 9-00 = 2 (can be set to anything except 1)
- 9-01 = 1
- 9-04 = 7 (RTU mode, stop bits equal to 1 & parity to even)
DVP 14SS2 has two communication ports namely RS232 and RS485 separately. Now, the communication port 2 settings need to be done according to the set parameters of VFD which are as follows.
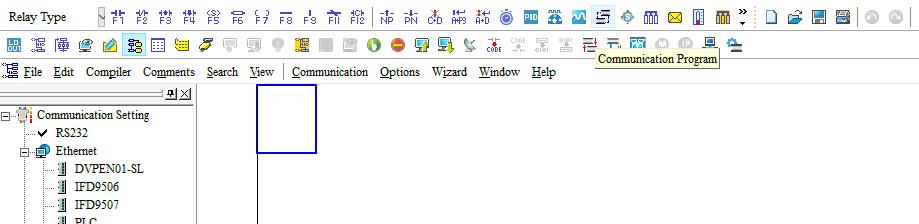
- Open the WPL soft. (Delta PLC Software)
- Click on the Communication Program icon on the programming page.
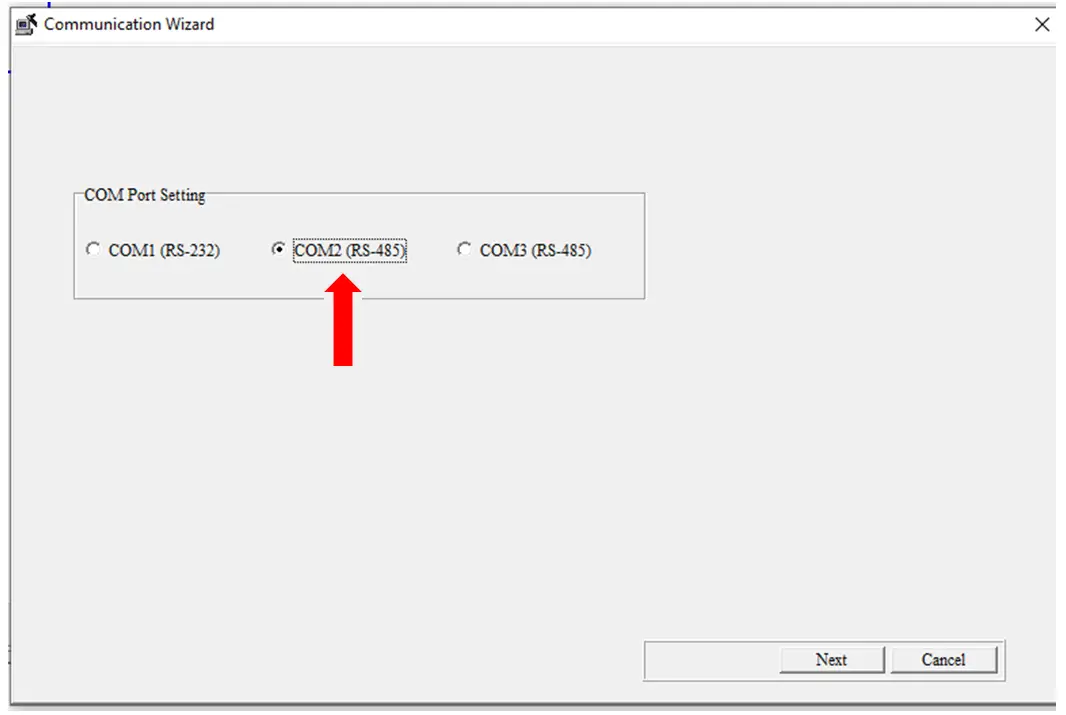
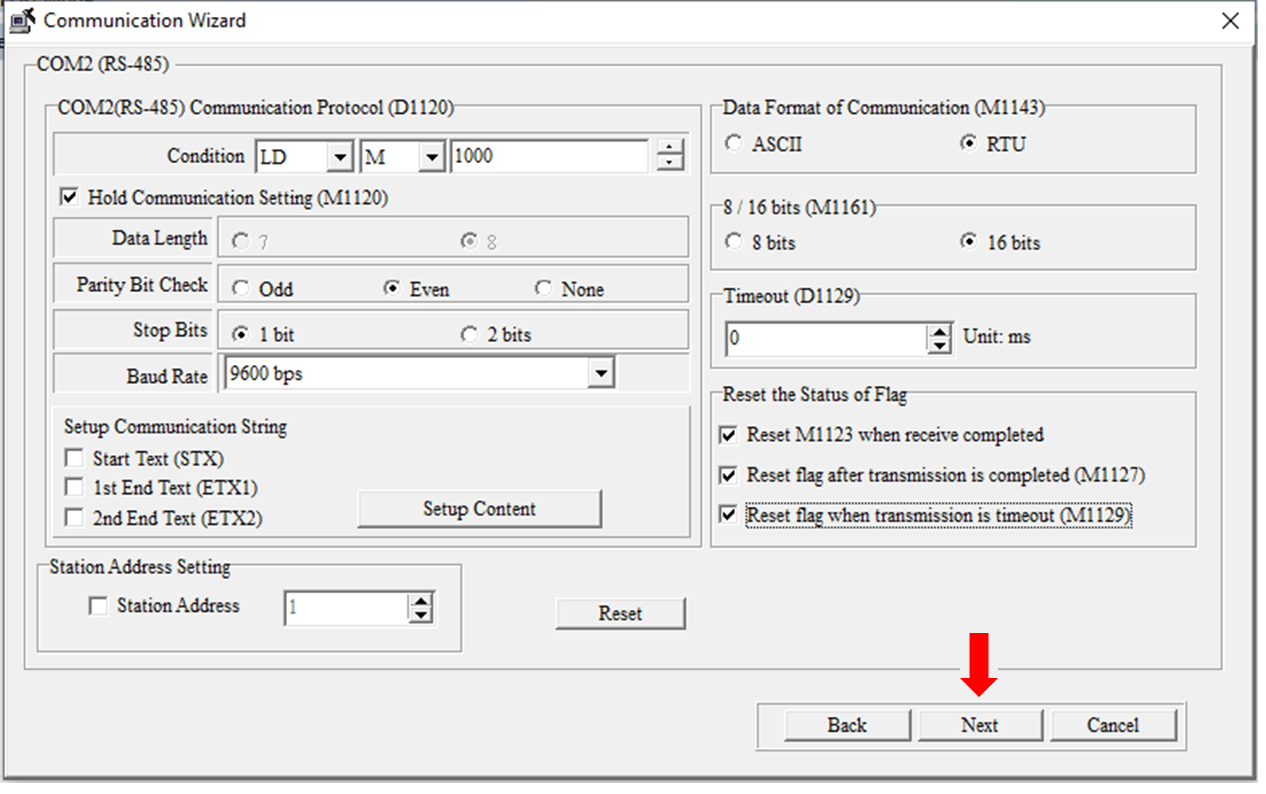
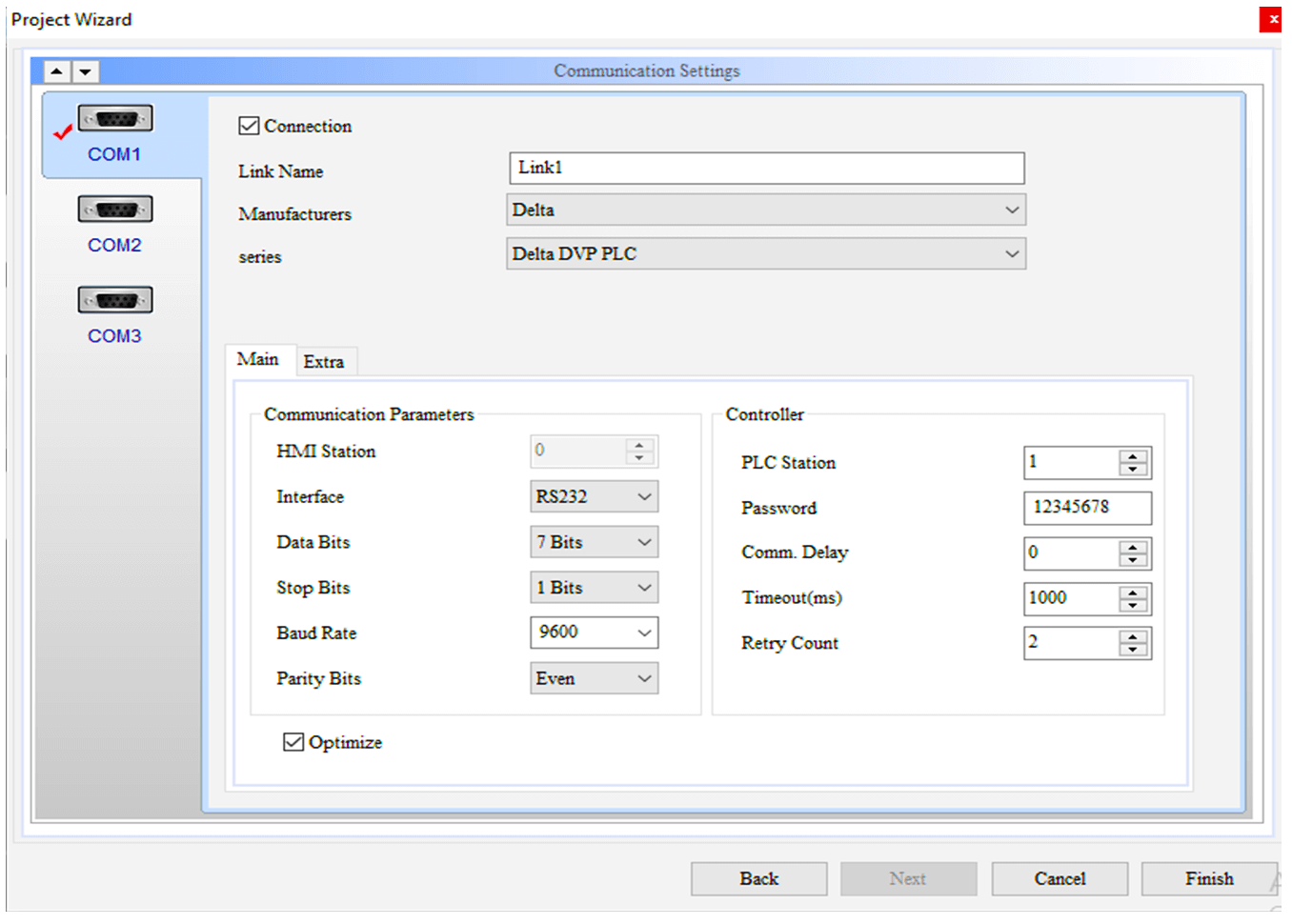
Select COM2 and press next.
Set the parameters according to the VFD drive communication parameters and click Next. Here, they are fed according to the parameters set in the VFD-L dive.
The station address of PLC is 1 (see left bottom corner)
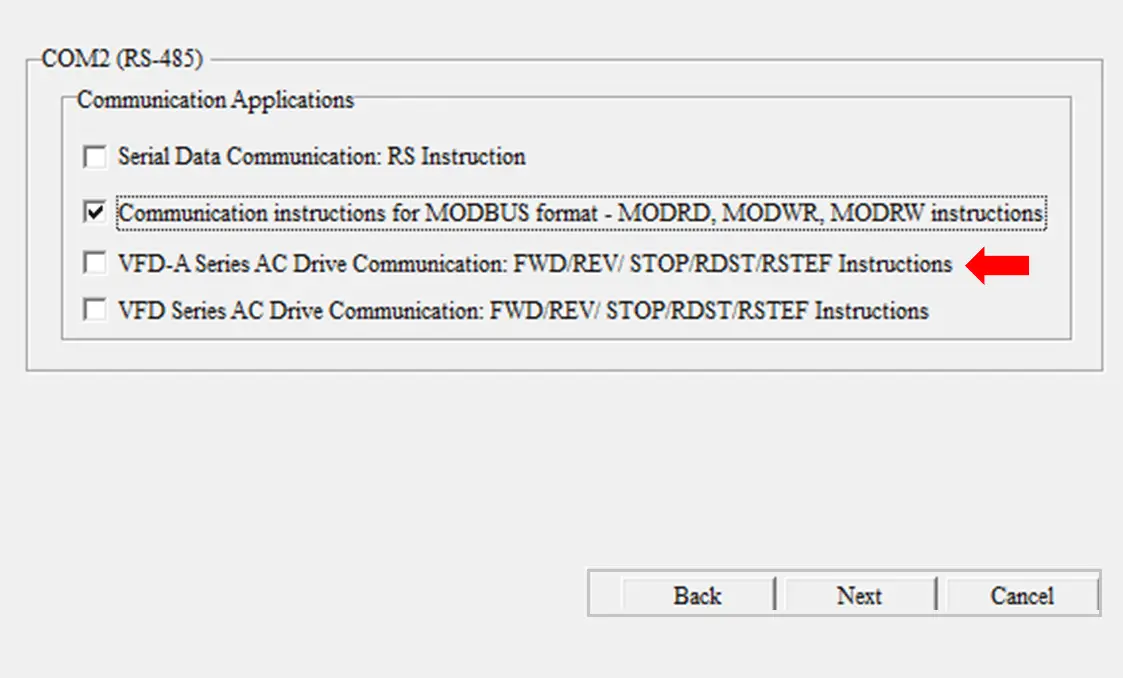
Check the highlighted and press next.
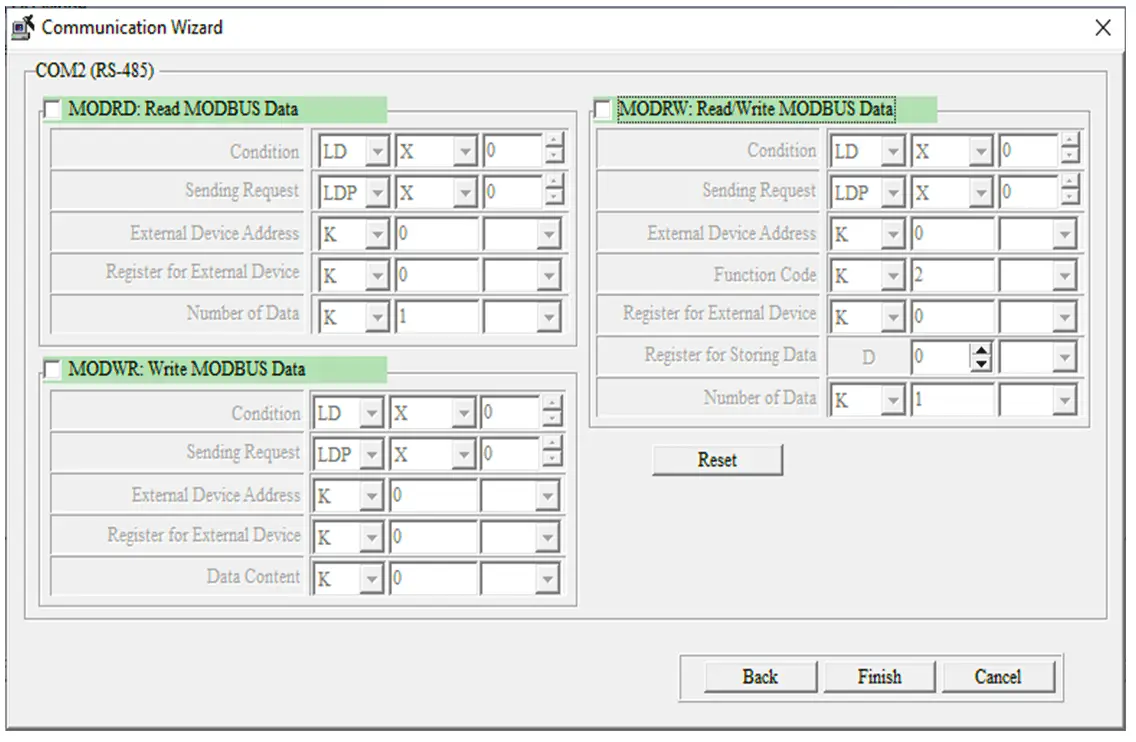
One can check the boxes below and write the conditions.
Here, we are skipping this window, and instead, we will write the logic directly on ladder diagram mode.
Click Finish.
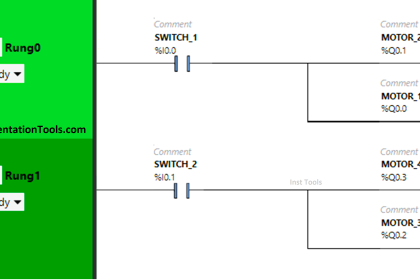
Now, the following ladder logic is generated as a result of the above set conditions.
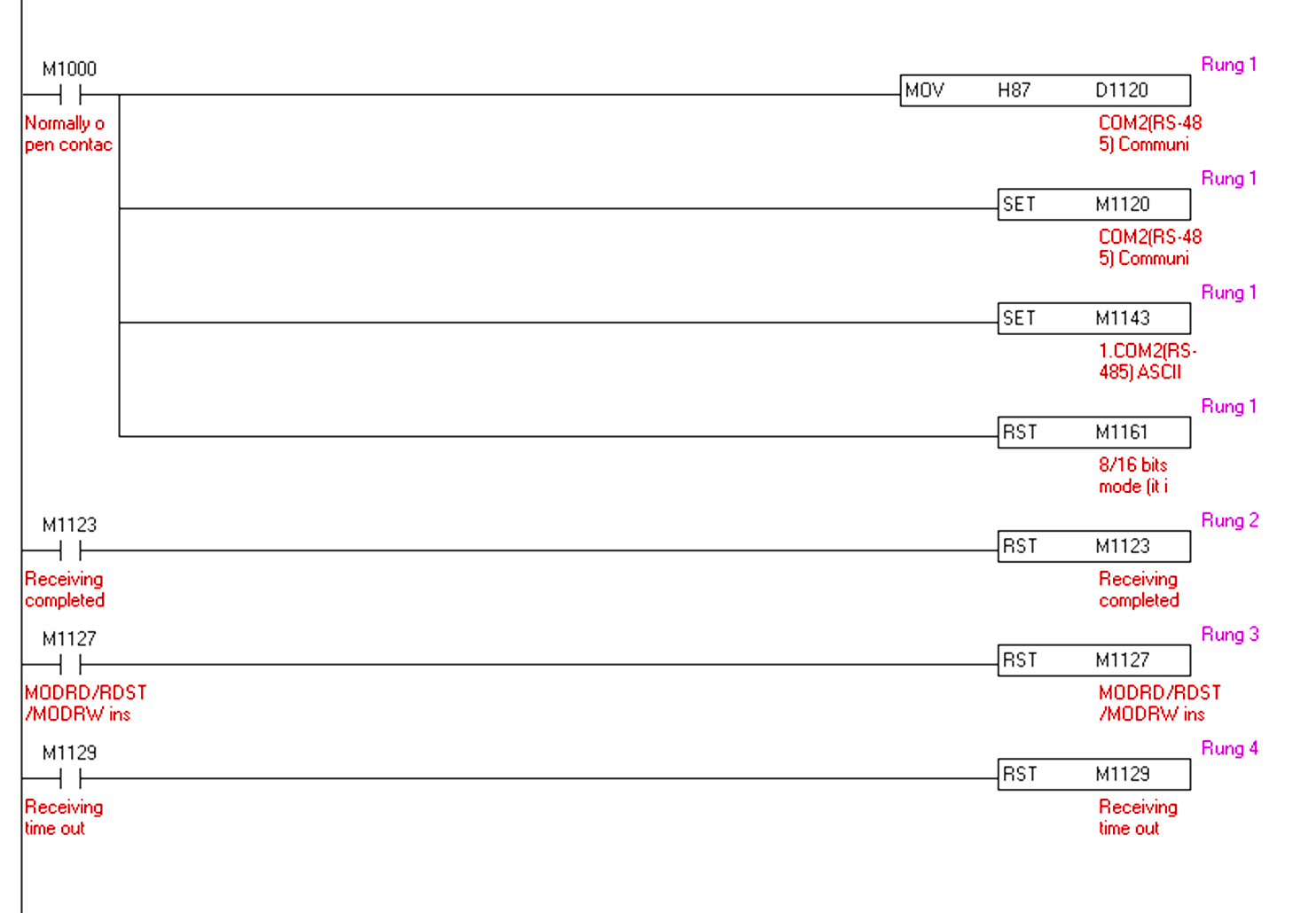
- The ladder in rung 2 executes each time a sent request is received.
- The ladder in rung 3 executes each time after any data is read from or written to the drive.
- Now, before moving further, the logic for starting and stopping the motor and its speed control is written, we need to find out the Modbus addresses of the drive through which the said will be executed.
- For the VFD-L series, 2000H is the Modbus address for starting & stopping the drive and 2001H is for the frequency change. Here, H denotes hexadecimal.
In this topic, we are here to use the decimal format for the particular address. So hexadecimal must be changed to decimal format.
Through the 8421 code, we would convert as follows:
- 2000 (Hex) = 8192 (Dec)
- 2001(Hex) = 8193 (Dec)
So, instead of 200H & 2001H, 8192K & 8193K will be used. Make sure that 8192 & 8193 are only the Modbus addresses.
- If 8192K has a value equal to 10 then the motor will start.
- If 8192K has a value equal to 1 then the motor will stop.
- If 8193K has a value equal to 5000 then the motor will run on 50 Hz, which means if the speed of the motor needs to be increased by 1 Hz, 100 must be added to the existing value and vice versa.
PLC Program Explanation
- Now, going to the details of the PLC program.
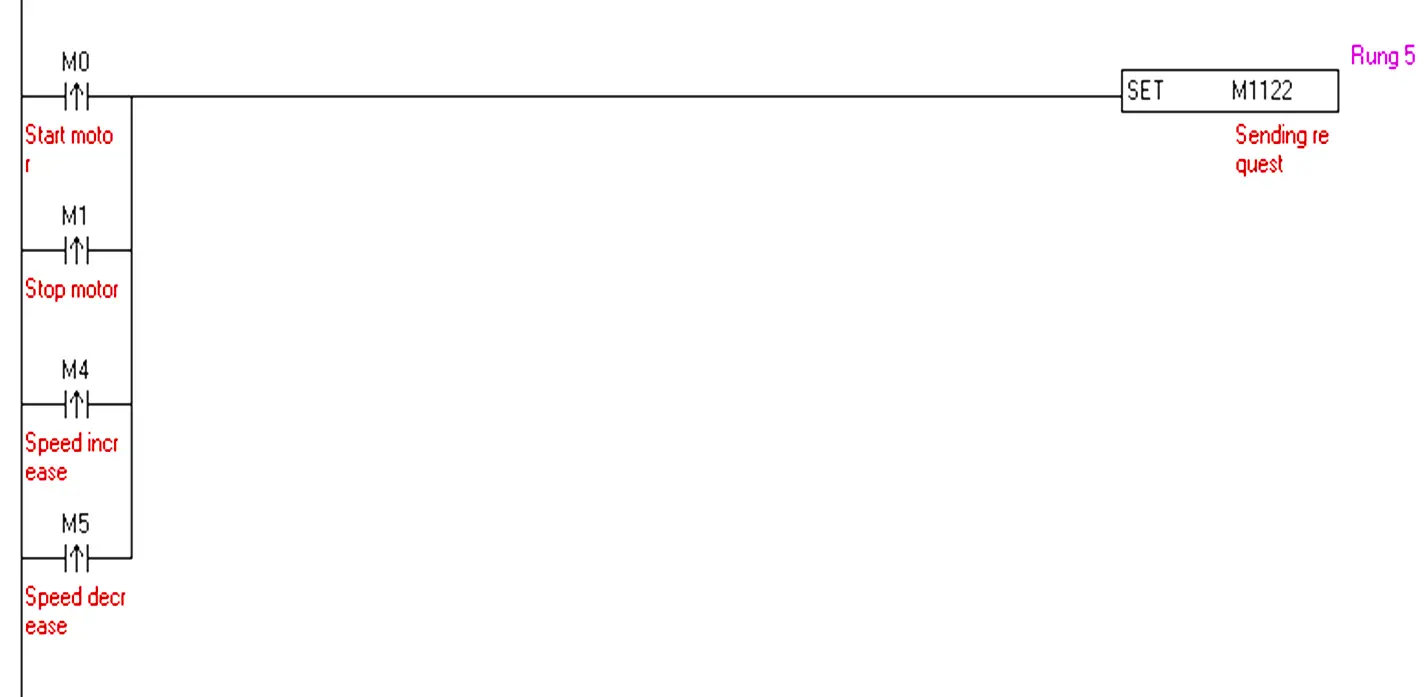
- Sending request bit M1122 is set each time any command is given to VFD in rung 5.
MODRW K2 K6 K8192 D70 K1
- MODRW represents Mod read write
- K2 represents the station address of the VFD.
- K6/K3 represents the function code whether to write or read. Here k6 represents write.
- K8192 represents the Modbus address to which data is written
- Data in D70 is written to k8192
- K1 is the data length
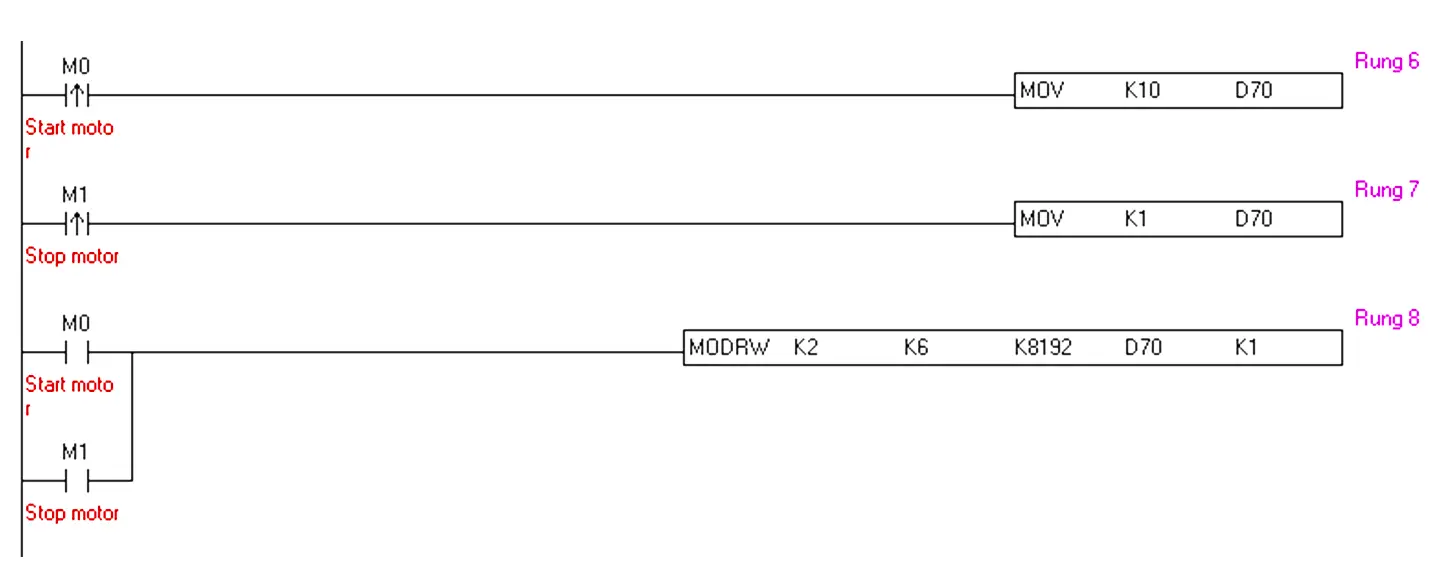
10 (dec) and 1 (dec) are moved to D70 when start and stop commands are given in rungs 6 and 7. At the same time, the transmission of data takes place i.e data in D70 is written to the 8192k address of VFD in rung 8 to start and stop the motor.
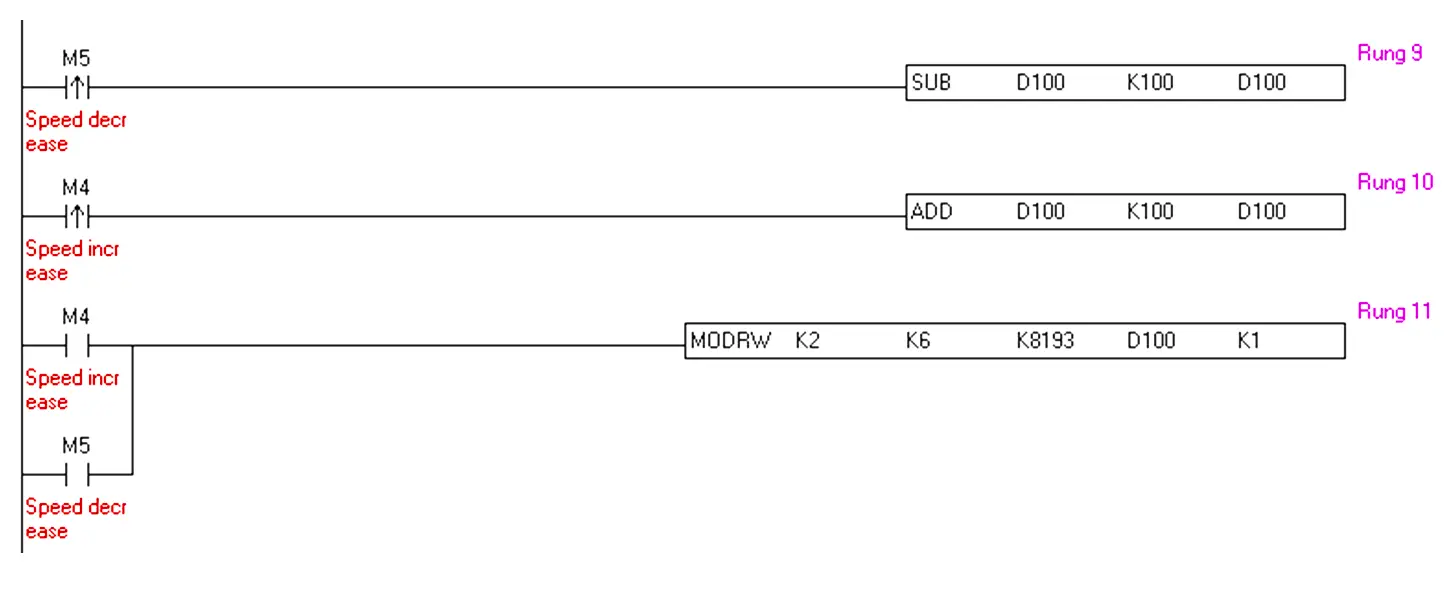
100 (dec) is added to D100’s value in rung 10 to increase the speed by 1 Hz when the speed increase pulse (M4) is received. 100 (dec) is subtracted from D100’s value in rung 9 to decrease the speed by 1 Hz when the speed decrease pulse (M5) is received.
At the same time, the transmission of data takes place i.e data in D100 is written to the 8193k address of VFD in rung 11 to start and stop the motor.
HMI
Now, coming to the HMI configuration.
After selecting the HMI model, set the below configuration as here, PLC to HMI configuration is on RS232. (You have to configure it as per the HMI model)
Take four momentary buttons, assign the addresses, and design the HMI screen as follows:
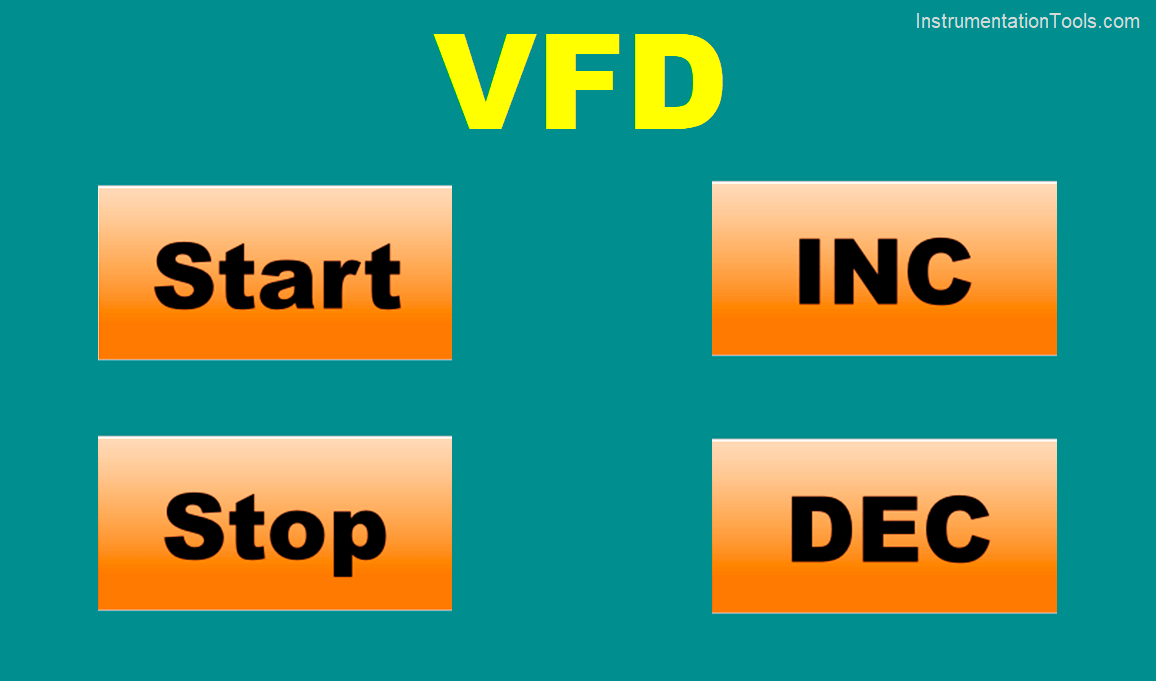
- Start = M0
- Stop = M1
- Increase speed = M4
- Decrease speed = M5
- Test the process
The HMI design is not covered in this article.
Delta PLC and VFD Control Program
The below Delta PLC and VFD training topic is shared for your understanding. This is another way of controlling the motor speed via Delta PLC using ISPsoft.
If you liked this article, then please subscribe to our YouTube Channel for Instrumentation, Electrical, PLC, and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:
- Design of PLC System
- How to Choose a SCADA?
- Compare NO and NC Contacts
- SCADA System Vulnerabilities
- Inputs and Outputs in Delta PLC




Hello Sir,
Sir your blog is good and interested can you please write a blog on delta b2 servo motor modbus communication with plc
Thanks mama….We are here to help you… If you want we can also make your project.
what should be done incase there are 2 vfd to be programmed in wplsoft. i do understand the m register will be different to start stop and all. what about the modbus address dec number to transfer the data?