First we have to know how offset error appears in Proportional controller. Click here to read the article on proportional controller offset error.
Automatic reset or integral action corrects for any offset between setpoint and process variable automatically by shifting the proportional band over a pre-defined time. The integral time repeats the proportional action over the time set.
Integral redefines the output requirements at the set point until the process variable and set point are equal. Integral engineering units vary by controller manufacturer.
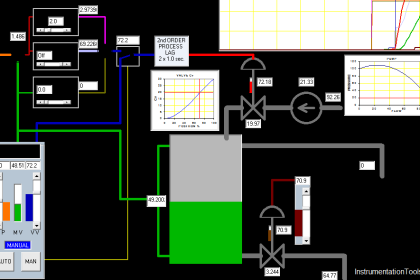
Some use repeats/minute (reset rate), minutes/repeat or seconds/repeat. In Figure below, seconds/repeat is used.
The integral term is added as follows:

The smaller the integral number, the proportional action will be repeated more often. If integral is too small, the process variable will oscillate through set point and create erratic control action.
If the number is too large, the action will be sluggish and unable to compensate for process upsets.

The integral number should be approximately 5 times the dead/lag time of the process variable. If the output is manually changed, dead time is defined as the time required for the process variable to initially react after the change.
The length of time that it takes for the process variable to stabilize at a steady state is lag time.
Example:
40 sec (dead/lag) x 5 = 200 sec/repeat
Articles You May Like :
Heuristic PID Tuning Procedure