“Feedforward” is a rather under-used control strategy capable of managing a great many types of process problems. It is based on the principle of preemptive load counter-action: that if all significant loads on a process variable are monitored, and their effects on that process variable are well-understood, a control system programmed to take appropriate action based on load changes will shield the process variable from any ill effect. That is to say, the feedforward control system uses data from load sensors to predict when an upset is about to occur, then feeds that information forward to the final control element to counteract the load change before it has an opportunity to affect the process variable. Feedback control systems are reactive, taking action after to changes in the process variable occur. Feedforward control systems are proactive, taking action before changes to the process variable can occur.
This photograph shows a kind of feedforward strategy employed by human operators running a retort : a steam-powered machine used to pressure-treat wooden beams at a milled lumber operation. The sign taped to this control panel reminds the operator to warn the maintenance department of an impending steam usage:
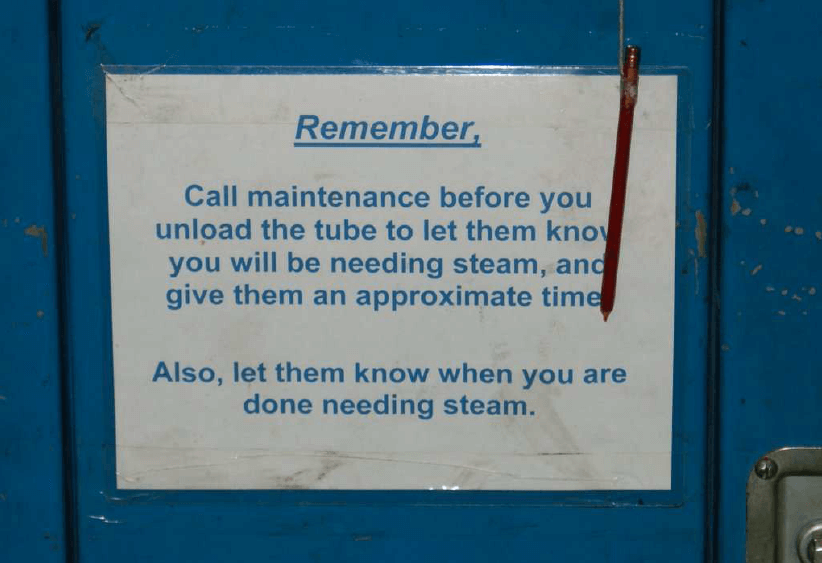
The story behind this sign is that a sudden demand in retort steam causes the entire facility’s steam supply pressure to sag if it happens at a time when the boiler is idling. Since the boiler’s pressure control system can only react to deviations in steam pressure from setpoint, the boiler pressure controller will not take any action to compensate for sudden demand until after it sees the steam pressure fall, at which point it may be too late to fully recover. If operators give the maintenance personnel advance notice of the steam demand, though, the boiler may be fired up for extra steam capacity and thus will be prepared for the extra demand when it comes. The upset avoided here is abnormally low steam header pressure, with the predictive load being the retort operator’s planned usage of steam. Crude as this solution might be, it illustrates the fundamental concept of feedforward control: information about a load change is “fed forward” to the final control element to preemptively stabilize the process variable.
The perfect feedforward control action is nearly impossible to achieve. However, even imperfect feedforward action is often far better than none at all, and so this control strategy is quite valuable in process control applications challenged by frequent and/or large variations in load.
Load Compensation
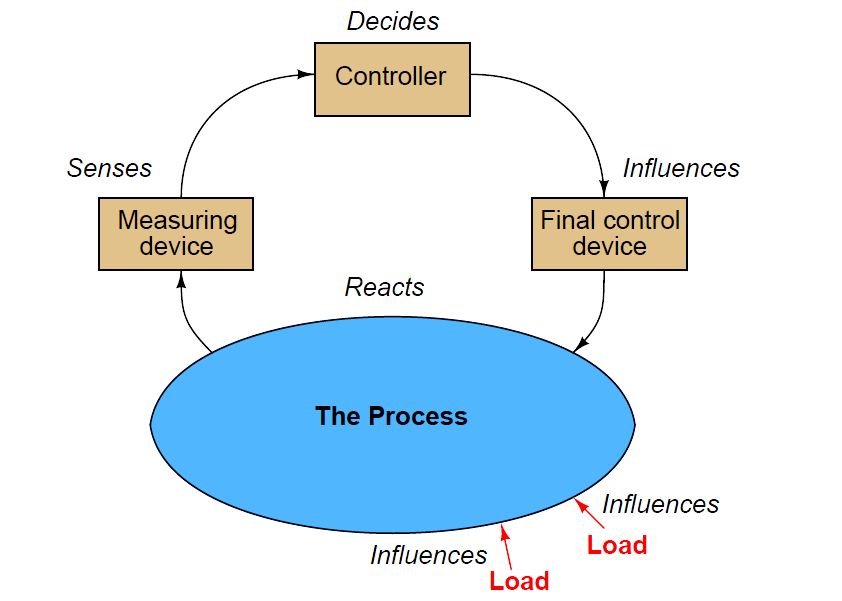
Feedback control works on the principle of information from the outlet of a process being “fed back” to the input of that process for corrective action. A block diagram of feedback control looks like a loop:
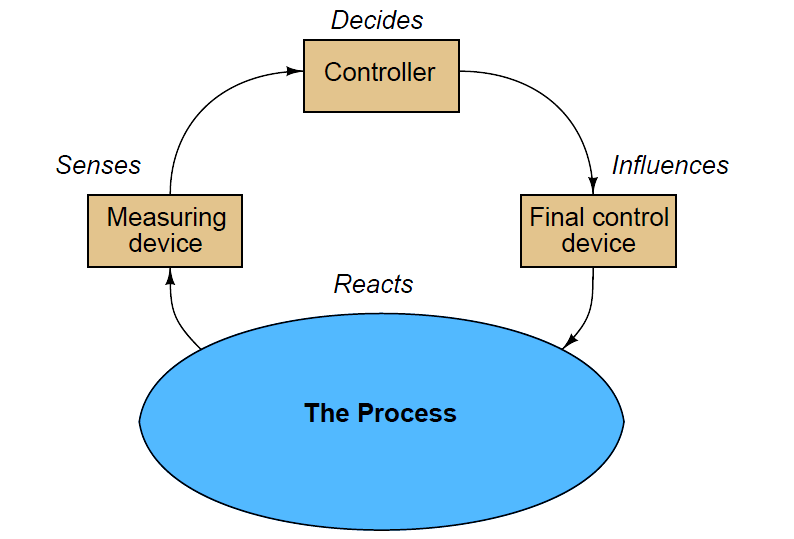
The reason any control system is necessary at all9 to maintain a process variable at some stable value is the existence of something called a load. A “load” is a variable influencing a process that is not itself under direct control, and may be represented in the block diagram as an arrow entering the process, but not within the control loop:
For example, consider the problem of controlling the speed of an automobile. In this scenario, vehicle speed is the process variable being measured and controlled, while the final control device is the accelerator pedal controlling engine power output. If it were not for the existence of hills and valleys, head-winds and tail-winds, air temperature changes, road surface variations, and a host of other “load” variables affecting car speed, maintaining a constant speed would be as simple as holding the accelerator pedal at a constant position.
However, the presence of these “load” variables makes necessitates a human driver (or a cruise control system) continually adjusting engine power to maintain constant speed. Using the car’s measured speed as feedback, the driver (or cruise control) adjusts the accelerator pedal position as necessary based on whether or not the car’s speed matches the desired “setpoint” value.
An inherent weakness of any feedback control system is that it can never be proactive. The best any feedback control system can ever do is react to detected disturbances in the process variable. This makes deviations from setpoint inevitable, even if only for short periods of time. In the context of our automobile cruise control system, this means the car can never maintain a perfectly constant speed in the face of loads because the control system does not have the ability to anticipate loads (e.g. hills, wind gusts, changes in air temperature, changes in road surface, etc.). At best, all the feedback cruise control system can do is react to changes in speed it senses after some load has disturbed it.
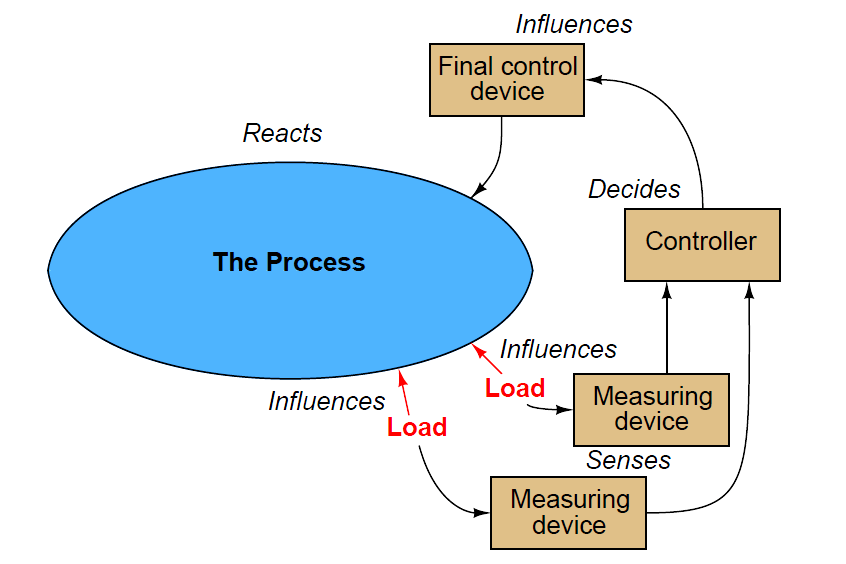
Feedforward control addresses this weakness by taking a fundamentally different approach, basing final control decisions on the states of load variables rather than the process variable. In other words, a feedforward control system monitors the factor(s) influencing a process and decides how to compensate ahead of time before the process variable deviates from setpoint. If all loads are accurately measured, and the control algorithm realistic enough to predict process response for these known load values, the process variable (ideally) need not be measured at all:
As was the case with cascade control, feedforward control also has an analogue in workplace management. If you consider a supervisor to be the “controller” of a work group (issuing orders to his or her subordinates to accomplish important tasks), a feedforward system would be when someone informs the supervisor of an important change that will soon impact the work group. By having this information “fed forward” to the supervisor, the supervisor may then take preemptive measures to better manage this change before its effects are fully felt. If this predictive information is accurate, and the supervisor’s response appropriate, any negative impacts of the change will be minimized to the point where no reactive steps will be needed. Stated differently, good feedforward control action translates what would otherwise be a crisis into an insignificant event.
Returning to the cruise control application, a purely feedforward automobile cruise control system would be interfaced with topographical maps, real-time weather monitors, and road surface sensors to decide how much engine power was necessary at any given time to attain the desired speed.
Assuming all relevant load variables are accounted for, the cruise control would be able to maintain constant speed regardless of conditions, and without the need to even monitor the car’s speed.
This is the promise of feedforward control: a method of controlling a process variable so perfect in its predictive power that it eliminates the need to even measure that process variable. If you are skeptical of this feedforward principle and its ability to control a process variable without even measuring it, this is a good thing – you are thinking critically! In practice, it is nearly impossible to accurately account for all loads influencing a process and to both anticipate and counter-act their combined effects, and so pure feedforward control systems are rare. Instead, the feedforward principle finds use as a supplement to normal feedback control. To understand feedforward control better, however, we will consider its pure application before exploring how it may be combined with feedback control.