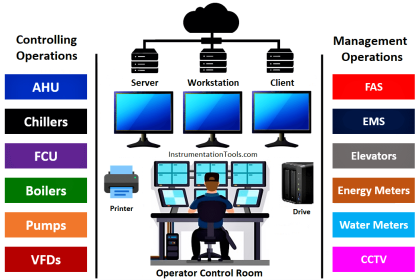
Direct Digital Control (DDC) is the automated control of a condition or process by a digital device.
DDC takes a centralized network-oriented approach. All instrumentation is gathered by various analog and digital converters which use the network to transport these signals to the central controller.
The centralized computer then follows all of its production rules (which may incorporate sense points anywhere in the structure) and causes actions to be sent via the same network to valves, actuators, and other HVAC components that can be adjusted.
A microprocessor operating at sufficient clock speed is able to execute more than one PID control algorithm for a process loop, by “time-sharing” its calculating power: devoting slices of time to the evaluation of each PID equation in rapid succession.
This not only makes multiple-loop digital control possible for a single microprocessor, but also makes it very attractive given the microprocessor’s natural ability to manage data archival, transfer, and networking.
A single computer is able to execute PID control for multiple loops, and also make that loop control data accessible between loops (for purposes of cascade, ratio, feedforward, and other control strategies) and accessible on networks for human operators and technicians to easily access.
Such direct digital control (DDC) has been applied with great success to the problem of building automation, where temperature and humidity controls for large structures benefit from large-scale data integration.
Note : The DDC Systems are outdated and NO more using the industries. These may utilize for specific applications are for a small control units.
The following photograph shows a Siemens APOGEE building automation system with multiple I/O (input/output) cards providing interface between analog instrument signals and the microprocessor’s digital functions:
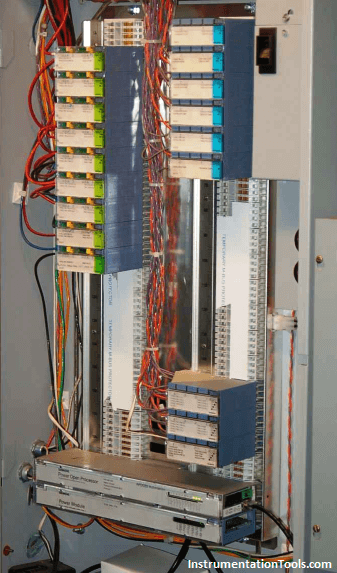
Other than a few LEDs, there is no visual indication in this panel of what the system is doing at any particular time.
Operators, engineers, and technicians alike must use software running on a networked personal computer to access data in this control system.
An example of the HMI (Human-Machine Interface) software one might see used in conjunction with a DDC controller is shown here, also from a Siemens APOGEE building control system:
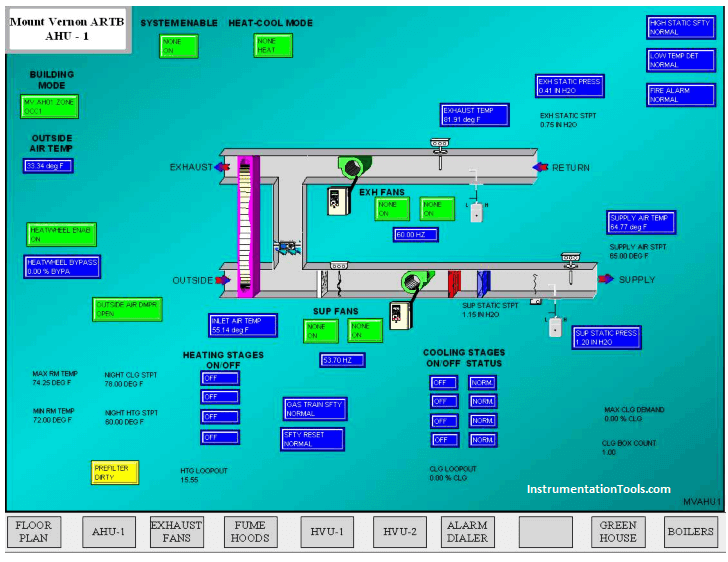
This particular screenshot shows monitored and controlled variables for a heat exchanger (“heat wheel”) used to exchange heat between outgoing and incoming air for the building.
A smaller-scale example of a DDC system is the Delta model DSC-1280 controller, an example shown in the following photograph:
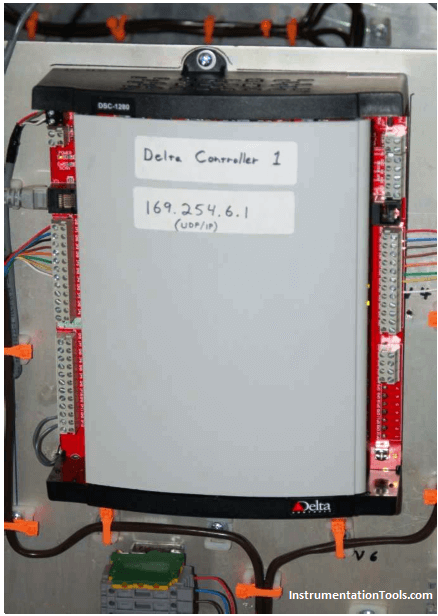
This system does not have plug-in I/O cards like the Siemens APOGEE, but instead is monolithic in design, with all inputs and outputs part of one large “motherboard” PCB. The model DSC-1280 controller has 12 input channels and 8 output channels (hence the model number “1280”).
An Ethernet cable (RJ-45 plug) is seen in the upper-left corner of this unit, through which a remotely- located personal computer communicates with the DDC using a high-level protocol called BACnet.
In many ways, BACnet is similar to Modbus, residing at layer 7 of the OSI Reference Model (the so-called Application Layer ), unconcerned with the details of data communication at the Physical or Data Link layers.
This means, like Modbus, BACnet commands may be sent and received over a variety of lower-level network standards, with Ethernet being the preferred for the above model.
Another example of a small-scale DDC is this Distech model ECP-410 unit:

This controller uses LonWorks as its communication protocol rather than BACnet. Like BACnet, LonWorks is an upper-layer protocol and may be transported over Ethernet as well as simpler serial communication formats. The model ECP-410 DDC controller has a two-wire connection for its LonWorks network.
Programming of DDC controllers ranges from text-based languages (similar to BASIC) to function-block programming.
The Delta DSC-1280 is an example of a controller programmed in text, while the Distech ECP-410 supports function blocks in addition to text-based programming.
The application-specific nature of DDC (environmental controls for the interior of large buildings and other facilities) lends itself to controller units pre-programmed to perform well-defined tasks rather than general-purpose controllers designed to be user-programmable for any task.
An example of such a “fixed” program controller is the Distech model EC-RTU-L, designed to control a “rooftop unit” for air handling:
A more common application of industrial DDC is the use of programmable logic controllers (PLCs) to control multiple loops.
PLCs were originally invented for on/off (discrete) process control functions, but have subsequently grown in speed and capability to execute analog PID control functions as well.
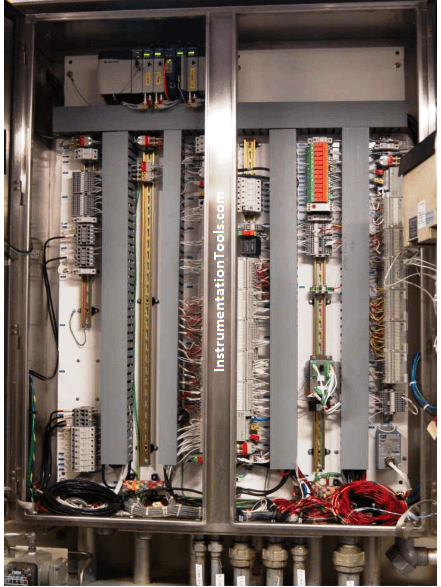
This next photograph shows an Allen-Bradley (Rockwell) ControlLogix PLC used to control the operation of a gas turbine engine. The PLC may be seen in the upper-left corner of the enclosure, with the rest of the enclosure devoted to terminal blocks and accessory components:
A strong advantage of using PLCs for analog loop control is the ability to easily integrate discrete controls with the analog controls.
It is quite easy, for example, to coordinate the sequential start-up and shut-down functions necessary for intermittent operation with the analog PID controls necessary for continuous operation, all within one programmable logic controller.
It should be noted, however, that many early PLC implementations of PID algorithms were crude at best, lacking the finesse of stand-alone PID controllers.
Credits : Tony R. Kuphaldt – Creative Commons Attribution 4.0 License