“A to D” or A/D Converter:
A to D means Analog to Digital. This electronic hardware converts an analog signal like voltage, electric current, temperature, or pressure into a digital number that a computer can process and interpret.
Active Model Capture:
This technology involves the automated capture of process models from naturally-occurring process data.
For example, when the operator makes a setpoint change, a process model can be developed. For more on active model capture.
Auto Mode:
In auto mode the controller calculates the output based its calculation using the error signal (difference between setpoint and PV).
Anti-Reset Windup:
Same as reset windup.
Bump Test:
To determine a process model, there needs to be some “excitation” of the process. This is typically accomplished through bump testing. Bump tests can be performed many ways.
Some ways to do this include:
- Make a Setpoint Change
- With the loop in MANUAL, change the controller output
- Perform a Fast Plant Test
Closed Loop:
First Controller in automatic mode & second in cascade mode.
Cascade:
With 2 or more controllers. The output of the “Master” controller is the setpoint for the “Slave” controller. A classic example is the control of a reactor (a large vessel with a steel jacket around it).
The product temperature (master) controller’s output is the setpoint of the jacket temperature (slave) controller.
Composition:
A process variable. Represents the amount of one material in a solution, or gas.
MV or CO or Controller Output:
Same as output.
Corner Frequency:
For first order time constants, the “corner frequency” is the frequency where the amplitude ratio starts to turn and the phase lag equals 45 degrees. Also:
corner frequency = 1/(time constant) radians/time
DDE Windows Dynamic Data Exchange.
A standard software method for communicating between applications under Microsoft Windows. Created by Microsoft starting with Windows 3.1. DDE is being replaced by OLE for process control.
Dead Time:
Dead time is the amount of time that it takes for your process variable to start changing after your valve changes. If you were taking a shower, the dead time is the amount of time it would take for you (the controller) to feel a change in temperature after you have adjusted the hot or cold water.
Pure dead time processes are usually found in plug flow or solids transportation loops. Examples are paper machine and conveyor belt loops. Dead time is also called delay. A controller cannot make the process variable respond before the process dead time.
To a controller, a process may appear to have more dead time than what it actually has. That is, the controller cannot be tuned tight enough (without going unstable) to make the process variable respond appreciably before an equivalent dead time.
More accurately, the characteristic time of the loop is determined by equivalent dead time. Equivalent dead time consists of pure dead time plus process components contributing more than 180 degrees of phase lag.
The phase of dead time increases proportionally with frequency. Any process having more than 180 degrees phase lag has equivalent dead time.
Derivative:
The “D” part of PID controllers. With derivative action, the controller output is proportional to the rate of change of the process variable or error. Some manufacturers use the term rate or pre-act instead of derivative.
Derivative, rate, and pre-act are the same thing. Derivative action can compensate for a changing process variable. Derivative is the “icing on the cake” in PID control, and most people don’t use it. It can make the controller output jittery on a noisy loop and most people don’t use derivative on noisy loops for this reason.
Delay:
This term is often used in place of dead time.
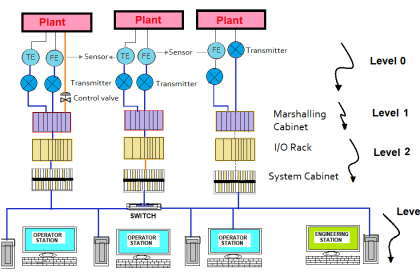
DCS:
Distributed Control System. DCS refers to larger analog control systems like Fisher, Foxboro, Honeywell, and Bailey systems. DCSs were traditionally used for PID control in the process industries, whereas PLCs were used for discrete or logic processing.
However, PLCs are gaining capability and acceptance in doing PID control. Most utilities, refineries and larger chemical plants use DCSs. These systems cost from twenty thousand to millions of dollars.
Discrete Logic:
Refers to digital or “on or off” logic. For example, if the car door is open and the key is in the ignition, then the bell rings.
Discrete I/O:
Senses or sends either “on or off” signals to the field. For example a discrete input would sense the position of a switch. A discrete output would turn on a pump or light.
Dominant Dead Time Process:
If the dead time is larger than the lag time the process is a dominant dead time process.
Dominant Lag Process:
Most processes consist of both dead time and lag. If the lag time is larger than the dead time, the process is a dominant lag process. Most process plant loops are dominant lag types. This includes most temperature, level, flow and pressure loops.
Error:
Error = setpoint – PV.
In auto mode, the controller uses the error in its calculation to find the output that will get you to the setpoint.
Equivalent Dead Time:
To a controller, a process may appear to have more dead time than what it actually has. That is, the controller cannot be tuned tight enough (without going unstable) to make the process variable respond appreciably before an equivalent dead time.
More accurately, the characteristic time of the loop is determined by equivalent dead time consisting of pure dead time plus process components contributing more than 180 degrees of phase lag.
The phase of dead time increases proportionally with frequency. Any process having more than 180 degrees phase lag has equivalent dead time.
Fast Plant Test:
A process test designed to quickly gather process model information from slow processes. This method works well with slow loops such as temperatures, compositions, and some tank levels.
Gain (of the controller):
This is another way of expressing the “P” part of the PID controller. GAIN = 100/(Proportional Band). The more gain a controller has the faster the loop response and more oscillatory the process.
Gain (of the process):
Gain is defined as the change in input divided by the change in output. A process with high gain will react more to the controller output changing.
For example, picture yourself taking a shower. You are the controller. If you turned the hot water valve up by half a turn and the temperature changed by 10 degrees this would be a higher gain process than if the temperature changed only 3 degrees.
Gain Margin:
The difference in the logarithms of the amplitude ratios at the frequency where the combined phase angle is 180 degrees lag is the GAIN MARGIN.
Hysteresis:
In a valve with loose linkages, the air signal to the valve will have to change by an amount equal to the hysteresis before the valve stem will move.
Once the valve has begun to move in one direction it will continue to move if the air signal keeps moving in the same direction. When the air signal reverses direction, the valve will not move until the air signal has changed in the new direction by an amount equal to the hysteresis.
I/O:
Input/Output. Refers to the electronic hardware where the field devices are wired. Discrete I/O would have switches for inputs and relay outputs to fire solenoid valves or pump motors. Analog I/O would have process variable inputs, and variable controller outputs.
Integrating Process:
With these loops, making a small change in the controller ouptut, will cause the process variable to ramp until it hits a limit. The larger the change, the faster the ramp. Also the smaller the integral time the faster it will move.
It is a common mis-conception that integral time in the controller is not required to hold setpoint with an integrating process.
Most control loops are self-regulating. Self-regulating means that with a change in the controller output, the process variable will move and then settle. Integrating loops are also described as non-self-regulating. The most common example of an integrating processes is Tank Level.
Integral Action:
The “I” part of the PID controller. With integral action, the controller output is proportional to the amount andduration of the error signal. If there is more integral action, the controller output will change more when error is present.
If your units on integral are in “time/rep” or “time” then decreasing your integral setting will increase integral action. If your units on integral are in “rep/time or “1/time” then increasing your integral setting increases integral action.
Load Upset:
An upset to the process (that is not from changing the set-point).
A simple example: you are taking a shower and someone flushes the toilet. The temperature suddenly changes on you, the controller. Another example: you are injecting steam into flowing cold water to get lukewarm water, and the inlet cold water changes temperature.
Lag Time:
Lag time is the amount of time after the dead time that the process variable takes to move 63.3% of its final value after a step change in valve position.
Lag time is also called a capacity element or a first order process. Very few real processes are pure lag. Almost all real processes contain some dead time.
Measurement:
Same as “process variable.”
Manual Mode:
In manual mode, the user sets the output.
Mode:
Auto, manual, or remote. In auto mode the controller calculates the output based its calculation using the error signal (difference between setpoint and PV).
In manual mode, the user sets the output. In remote, the controller is actually in auto but gets its setpoint from another controller.
MMI: Man Machine Interface.
Also known as “HMI” or Human-Machine Interface. Refers to the software and hardware that the process operator “sees” the process with.
An example MMI screen may show you a tank with levels and temperatures displayed with bar graphs and values. Valves and pumps are often shown and the operator can “click” on a device to turn it on, off or make a setpoint change. Examples are Intellution’s FIX DMACS, Wonderware’s Intouch, Genesis’s ICONICS, TA Engineering’s AIMACS, and Intec’s Paragon.
Open Loop:
Controller in manual mode.
OPC or OLE for Process Control
It is a standard set by the OPC Foundation for fast and easy connections to controllers. ExperTune Inc, is an OPC Foundation Member.
Output:
Output of the PID controller. In auto mode the controller calculates the output based its calculation using the error signal (difference between setpoint and PV). In manual mode, the user sets the output.
Phase Margin:
The difference in phase at the frequency where the combined process and controller amplitude ratio is 0 is the PHASE MARGIN.
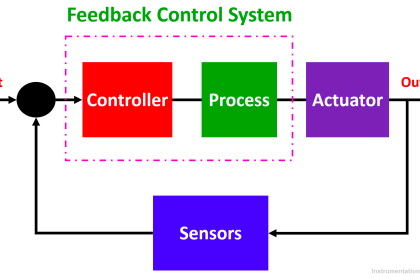
PID Controller:
Controllers are designed to eliminate the need for continuous operator attention. Cruise control in a car and a house thermostat are common examples of how controllers are used to automatically adjust some variable to hold the process variable (or process variable) at the set-point.
The set-point is where you would like the process variable to be. Error is defined as the difference between set-point and process variable.
(error) = (set-point) – (process variable)
The output of PID controllers will change in response to a change in process variable or set-point.
pH:
A measure of how acidic or basic a solution is. pH is often a process variable to control.
PLC: Programmable Logic Controller.
These computers replace relay logic and usually have PID controllers built into them. PLCs are very fast at processing discrete signals (like a switch condition). The most popular PLC manufacturers are Allen Bradley, Modicon, GE, and Siemens (or TI).
PV or Process Variable:
What you are trying to control: temperature, pressure, flow, composition, pH, etc. Also called the measurement.
Proportional Band:
The “P” of PID controllers. With proportional band, the controller output is proportional to the error or a change in process variable.
Proportional Band = 100/Gain
Proportional Gain:
This is the “P” part of the PID controller. (Proportional gain)=100/(Proportional Band).
PV Tracking:
An option on many controllers. When a control loop is in MANUAL, with PV Tracking turned on, the controller setpoint will follow the PV.
When the loop is returned to AUTO, there is no sudden movement of the process, because the PV is already at setpoint. If PV Tracking is turned off, returning to AUTO will drive the loop to its previous setpoint.
Rate:
Same as the derivative or “D” part of PID controllers.
Register:
A storage location in a PLC. The ExperTune PID Tuner needs to know certain register addresses to tune loops in PLCs.
Regulator:
When a controller changes a process variable to move the process variable back to the setpoint, it is called a regulator.
Reset:
Same as the integral or “I” part of PID controllers.
Reset Windup:
With a simple PID controller, integral action will continue to change the controller output value (in voltage, air signal or digital computer value) after the actual output reaches a physical limit. This is called reset (integral) windup.
For example, if the controller is connected to a valve which is 100% open, the valve cannot open farther.
However, the controller’s calculation of its output can go past 100%, asking for more and more output even though the hardware cannot go past 100%.
Most controllers use an “anti-reset windup” feature that disables integral action using one of a variety of methods when the controller hits a limit.
Robust:
A loop that is robust is relatively insensitive to process changes. A less robust loop is more sensitive to process changes.
Sample Interval:
The rate at which a controller samples the process variable, and calculates a new output. Ideally, the sample interval should be set between 4 and 10 times faster than the process dead time.
Set-Point:
The set-point is where you would like the process variable to be.
For example, the room you are in now has a setpoint of about 70 degrees. The desired temperature you set on the thermostat is the setpoint.
Servo:
When a controller changes a process variable to move the process variable in response to a setpoint change, it is called a servo.
Time Constant:
Same as lag time.








Nice