How Fieldbus Works
In analog controls systems, instruments produce a 4-20mA output signal that travels all the way from the remote field areas to the control room through marshalling rack, remote I/O cards or RTU over twisted pair cables.
Similarly, 4-20mA control signals travel from the control system to valve actuators, pumps and other control devices. Hundreds, sometimes thousands, of cables layed through cable trays, termination racks, cabinets, enclosures and conduit (Figure 1).
Foundation Fieldbus

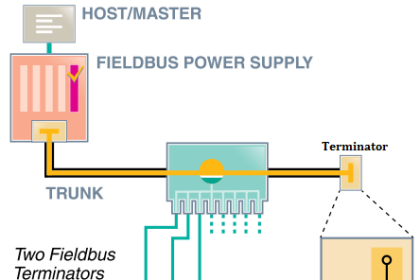
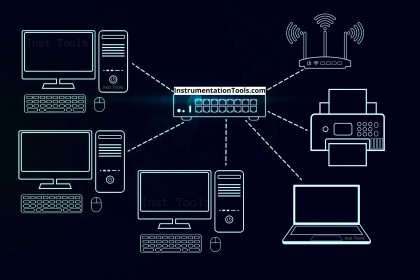
The availability of low cost, powerful processors suitable for field instrumentation now opens the way to remove the bulk of these cables and, at the same time, enhance data available from the plant. Instead of running individual cables, fieldbus allows multiple instruments to use a single cable, called a “trunk” or a “segment,” (Figure 2); each instrument connects to the cable as a “drop.” Instruments, of course, must have a fieldbus interface to connect to the segment, and some sort of software running to provide the fieldbus communications.
A fieldbus trunk or segment—either FOUNDATION fieldbus H1 or PROFIBUS PA—is a single twisted pair wire carrying both a digital signal and DC power that connects up to 32 fieldbus devices (temperature, flow, level and pressure transmitters, smart valves, actuators, etc.) to a DCS or similar control system. Most devices are two-wire bus-powered units requiring 10 to 20mA, but it is also possible to have 4-wire fieldbus devices, typically where a device has a particularly high current draw.
The fieldbus segment begins at an interface device at the control system. On a FOUNDATION fieldbus H1 (FF) system, the interface is called an H1 card; on a PROFIBUS PA system (PA), it is a PROFIBUS DP/PA segment coupler. In terms of signal wiring and power requirements for the segment, FF and PA are identical:
- Minimum device operating voltage of 9V
- Maximum bus voltage of 32V
- Maximum cable length of 1900m (shielded twisted pair)
The DC power required by the bus is normally sourced through a fieldbus power supply or “power conditioner” which prevents the high frequency communications signal from being shorted out by the DC voltage regulators.
Typical power conditioners make 350 to 500mA available on the bus and usually incorporate isolation to prevent segment-to-segment cross talk. For PA, the “segment coupler” usually incorporates the power conditioning component.
In FF segments, the power conditioners are separate from the H1 interface card and are often installed in redundant pairs to improve the overall reliability. Figure 3 shows a typical fieldbus segment.
When calculating how many devices can fit on a fieldbus segment, a user must take into account the maximum current requirement of each device, the length of the segment (because of voltage drops along the cable), and other factors.
The calculation is a simple Ohm’s law problem, with the aim of showing that at least 9V can be delivered at the farthest end of the segment, after taking into account all the voltage drops from the total segment current.
For example, driving 16 devices at 20mA each requires 320mA, so if the segment is based on 18AWG cable (50 Ohms/km/loop) with a 25V power conditioner, the maximum cable length is 1000m to guarantee 9V at the end.
Note that many users also specify a safety margin on top of the 9V minimum operating voltage, to allow for unexpected current loads and adding additional devices in the future.

Connecting Instruments
As noted, each fieldbus device connects to the segment in parallel, via a “drop” on the fieldbus segment called a spur. The simplest spur connection is a “T.” The problem with simple “T” connections (Figure 4), is that if any one of the devices or cables short out, it takes down the entire segment.
A short can occur during field maintenance of an instrument, from an accident in the field, corrosion causing electrical problems, or a host of other possibilities. Short-circuit protection is therefore a requirement for proper fieldbus implementation.
Another way to connect fieldbus devices is via junction boxes specifically designed for fieldbus, often referred to as “device couplers”.

Fieldbus(Figure 5)—that allow multiple fieldbus devices to connect at one location. Typically, users will install a device coupler in a field enclosure (JB), and connect nearby instruments to it. The fieldbus cable may continue onward to another device coupler. A multi-instrument segment may have several device couplers.
Two basic types of electronic spur short-circuit protection are used in device couplers: “current limiting” and “fold- back.” Both prevent a spur fault from shorting out the segment and both auto-reset back to normal on removal of the fault.
The current-limiting technique limits the amount of power the short circuit can draw to between 40 and 60mA (vendor dependent) but it also holds that fault on the segment continuously.
Although this design protects the segment from the initial short, the additional current draw can deprive other instruments on the segment of power, overload the segment power supply, and possibly cause catastrophic failures on the segment.

When a short circuit deprives other instruments of power, some may “drop off” the segment because they do not have enough power to operate properly.
Consequently, when current limiting protection is used in a device coupler, many end users allow a safety margin. That is, they do not install as many instruments as the segment can theoretically power; instead, they leave a certain number of spurs empty.
For example, if a user wants the segment to be able to keep working with two failures—which can draw up to 120mA of current—the segment calculations must assume a maximum current availability of 350mA minus 120mA for the faults, or 230mA.
Instead of theoretically being able to power 32 devices that draw 10mA each, the segment is now only able to support 23 such devices. In practice, some users are wary of relying on current limiting couplers, and most limit each segment to only 16 devices to prevent large-scale segment failures.

The fold-back technique, as used in Device Couplers, disconnects the shorted spur from the segment, thus preventing loss of an entire segment. The fold-back technique has a logic circuit on each spur (Figure 6) that detects a short in an instrument or spur, disconnects that spur from the segment, and illuminates a red LED that can be seen by maintenance personnel.
With fold-back device couplers, users no longer have to worry about spur failures and can have confidence about placing more devices on Fieldbus segments. Since the cost of H1 cards and other segment hardware can be cost-prohibitive, being able to place more devices on a segment can save users a considerable amount.
Segment Termination
Every fieldbus segment must be terminated at both ends for proper communication. If a segment is not terminated properly, communications errors from signal reflections may occur. Most device couplers use manual on/off DIP switches to terminate couplers. In a segment, the last device coupler should contain the terminator, and all couplers between the last coupler and the H1 card should have their terminator switches set to off.
The boxes with a “T” in Figure 3 and 5 illustrate where a typical segment is terminated properly. A frequent commissioning problem during startup is determining that terminators are correctly located. During
installation of the fieldbus system, the DIP termination switches sometimes are set incorrectly, creating problems during startup. The instruments can behave erratically, drop off the segment mysteriously, and generally raise havoc—all because the terminations are not set properly.
Diagnosing the problem often requires physically examining each device coupler to determine if the switches are set properly throughout the segment.
Automatic Segment Termination, as found in FF Device Couplers, simplifies commissioning and startup. It automatically activates when the device coupler determines that it is the last fieldbus device coupler in the segment; if it is, it terminates the segment correctly. If it is not the last device, it does not terminate the segment, since the downstream device coupler will assume that responsibility. No action—such as setting DIP switches—is necessary by the installation person to terminate a segment properly.
If a device coupler is disconnected from the segment accidentally or for maintenance, the Automatic Segment Termination detects the change, and terminates the segment at the proper device coupler. This allows the remaining devices on the segment to continue operation.
Justifying Fieldbus :
Advantages of Fieldbus Communication
Fieldbus was initially justified by the considerable cost savings that resulted from using less wiring. Instead of running hundreds or thousands of wires, fieldbus often required only a few dozen segments or trunks.
In recent years, the savings from running cables has been offset by the high cost of fieldbus components, and the reluctance of many users to install all the instruments possible on a segment. Being forced to provide for short circuits, for example, limits the number of instruments
that can be put on a segment. In many cases, it’s a toss- up, from a hardware cost and labor perspective. In other cases, when the full capability of a segment can be used, hardware cost savings become more realistic.
The true advantage of fieldbus is its ability to diagnose equipment problems, cut maintenance costs, provide information for asset management, allow control at the device level, and allow the use of smart devices. One oil company in Alaska did a study of savings it found by using a FOUNDATION fieldbus system. The savings included:
- Wiring — They achieved a 98% reduction in home- run wiring because with fieldbus they could eliminate the costly maze of wiring between each remote field instrument and the control room. Terminations were also reduced by 84%.
- Control room — Fewer terminations also freed up two-thirds of the cabinet space that would be required with traditional technology.
- Commissioning — Field check-out and QA/AC time was reduced by 83%. Installation of each transmitter took only 20 minutes rather than the two hours needed with non-fieldbus technology.
- Engineering drawings — Reduced the effort required for new drawings when adding oil wells by 92% because of FOUNDATION fieldbus and the host system’s configuration tools and object- oriented capabilities.
The oil and gas industry was the first to fully embrace fieldbus, and now installs it at many new refineries, offshore platforms and other facilities.
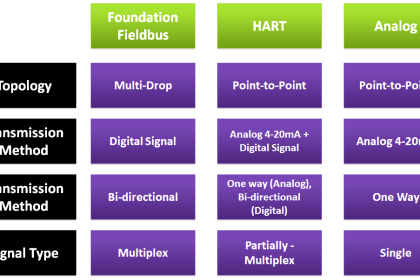
FOUNDATION Fieldbus H1 vs. PROFIBUS PA
From a field wiring perspective, FOUNDATION fieldbus and PROFIBUS are physically identical. They use the same twisted-pair cables and device couplers, and require the same segment terminators. Both handle up to 32 devices per segment.
One primary difference is that PROFIBUS is a polling system, while FOUNDATION fieldbus utilizes cyclic transmission. Other differences include:
- FF devices have scheduled times at which they transmit their information, whereas PA devices submit their data at random times. In PA, slave polling involves the bus master asking for information from the devices. The link active scheduler in FF has a timetable, so it determines when devices communicate on the segment.
- Address allocation in PA has to be done by communication with each device individually, whereas FF devices will announce themselves to the bus master.
- Each PA device will go back to the bus master with its info, which will then transmit to other devices the relevant data. FF devices can talk to each other and bypass the bus master, hence providing peer-to-peer communication.
- FF devices can have built-in function blocks that allow them to talk to each other peer-to-peer, perform control functions, and continue to operate if communications are lost to the control system. PROFIBUS systems do not have function block capability. PROFIBUS instrumentation reports to and takes directions from the PA master; if communications to the PA Master(s) are lost, the instruments must go to a fail-safe position or maintain their last settings until directed otherwise.
- FF and PA differ in the way that the segment control cards connect to the DCS or control system. FF uses an HSE (high speed Ethernet) network to connect remote H1 cards to the DCS; PA uses PROFIBUS DP, which is an RS-485 network, or PROFINET, an Ethernet-based network, to connect its PA devices to the DCS.
DD, EDDL and FDT
Both FF and PA systems require that instruments and controllers be “mapped” into the control system. That is, the DCS or control system must be told what devices are on the segment, what variables are to be input and output, and what functions are available. This is usually done with Device Description (DD) files, which are text-based
files that can be downloaded from a web site into either an FF or PA-based control system. For example, DD files from all FF devices that have received FF certification can be downloaded from the Fieldbus Foundation web site.
In general, DD files are universal; that is, they can be used in either a FF or PA system. During control system commissioning, DD files are downloaded into the control system’s equipment configuration. DD provides a standardized representation for the device that allows the host to interact with the device and allows the host to provide a consistent user interface for devices that is independent of the device type.
EDDL (Electronic Device Description Language) and FDT/ DTM (Field Device Tool and Device Type Management) are more advanced ways to describe devices. Typically,
EDDL is used by FF systems, while FDT/DTM is used by
PA systems, but the two technologies are growing closer.
EDDL starts with DD files. The DDL (Device Description Language) is the method for writing DD files. The next generation is EDDL (Electronic DDL), which provides additional information for GUI displays, configuration and calibration procedures, alarms and interfaces to higher- level software, such as MES, SCADA and plant historians. EDDL is independent of devices and operating systems.
DTMs are vendor-specific drivers that interact with the device. DTMs allow more sophisticated programs to be written, so configuration and management tools such as PACTware can be used to configure and view vendor specific data. They are also dependent on the host operating system, while EDDL is not.
To process the EDDL or FDT files, each control system vendor must have software capable of reading and understanding the files. For a while, a controversy existed in the fieldbus world, where some FF vendors would not accommodate FDT/DTM files, and vice versa.
Fortunately, two of the biggest control system vendors recently agreed to patch up their differences and support both systems, so the EDDL vs. FDT controversy appears to be ending. Soon, most control system vendors will support both EDDL and FDT.
An end user must ensure that all the instruments and field devices planned for a control system conform to the chosen fieldbus. If, for example, a FF system with EDDL is chosen, then all the instruments must have EDDL or
DD files; conversely, a PB system with FDT/DTM must use instruments that have those files. Fortunately, it is relatively easy to check, simply by consulting the web sites for FF or PA.
Read Also:
- Fieldbus Configuration
- Fieldbus Troubleshooting
- Calibration of Fieldbus Devices
- Function blocks of Fieldbus
- Fieldbus Logics in Devices








happy new year 2016 sir
Thank You
Happy new year bharadwaj reddy garu
Thank You
Excellent Explanations sir very usefull for me
thank you
Thank you very much such a great information.. Can you post for DP capillary type Level transmitter with calculations…. Thanks
Hello Nayeem, Please check in Level Measurement / Instrumentation Tools categories. Its already published. Thanks
Excellent article, but I cannot see any of the referred figures on the article. Is that on my end or are they actually missing?
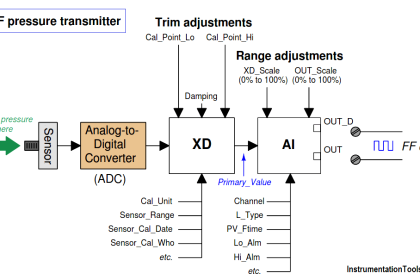
What is the output of FF transmitter ?
“Most devices are two-wire bus-powered units requiring 10 to 20mA, but it is also possible to have 4-wire fieldbus devices, typically where a device has a particularly high current draw.”
do you mean 4 to 20 mA OR its really 10 to 20 mA