We will learn the various terms and concepts related to an electrical motor like service, torque, horsepower, overload, cooling, speed, and slip.
Electric Service
Electric service is a term used to describe or define electrical power supplied to a motor. The selection of motor control products depends upon the information that is included as part of the electrical service.
This information includes:
- Current – The current used by the motor is either AC or DC.
- Phase – A motor can be powered by either single or polyphase electric power. The term polyphase means more than one phase and typically refers to 3 phases.
- Frequency – It is the number of electrical pulses that are transmitted over a given period of time. Frequency is measured in hertz (Hz) or cycles per second (cps).
In this example, you see that the voltage builds from zero, in the positive direction up to a peak positive value of + 460 V. Then it starts to decline in value until it reaches zero volts again.
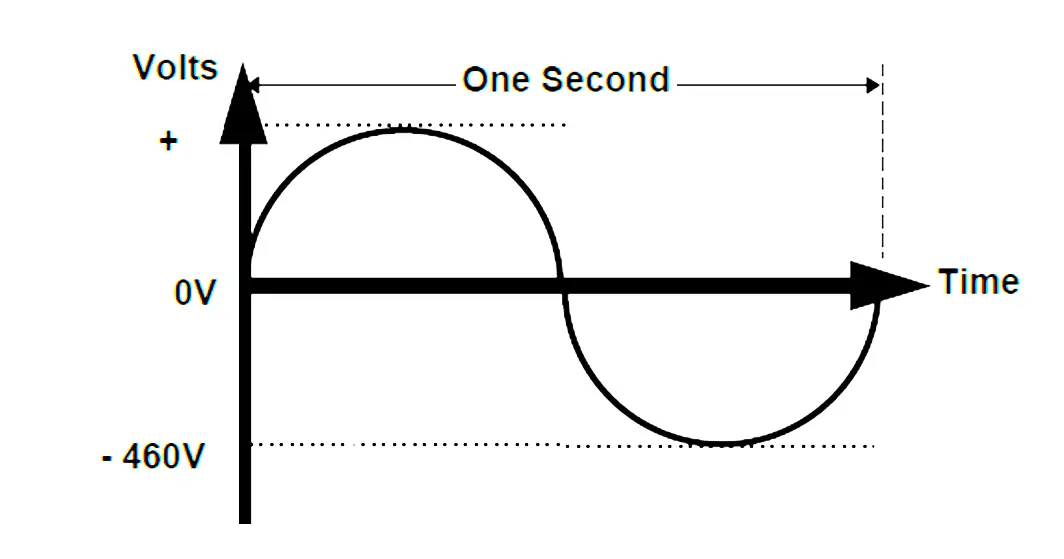
Next, the voltage starts in the negative direction until it reaches a peak value of – 460 V. Finally the voltage starts to move back in the positive direction until it reaches zero volts.
The change in voltage from zero to a peak positive value, back to zero, to a peak negative value, and back to zero is called 1 cycle. It has taken time for a cycle to occur.
In our example, that time is one second. Frequency is measured in terms of cycles per second and the frequency of this example is one cycle per second. The more common term for frequency is called Hertz. One Hertz equals one cycle per second.
Alternating current completes these cycles very rapidly and the number of cycles per second is known as the frequency. Throughout the United States AC current typically goes through a cycle 60 times per second, so the frequency is 60 Hertz. In many foreign countries, the AC current cycles 50 times per second, so the frequency is 50 Hertz.
- Voltage – Electric motors are designed to operate using a specific voltage. Motor control devices are also rated according to the voltage that can be applied to them.
Locked Rotor Current
It is the current flow required by a motor in order for the motor to start. Locked rotor current may be called Locked rotor amps (LRA).
Full Load Amps
This is the current flow required by a motor during normal operation to produce its designed HP. Full load amps (FLA) are also called Full Load Current or (FLC).
Speed, Torque, and Horsepower
Let’s start with Horsepower. Motors and engines are measured in horsepower. A horsepower is a standard unit of power that is used to measure the rate at which work is done.
One Horsepower is the equivalent of 550 foot pounds per second — that is the ability to lift 550 pounds one foot in one second. For example, if an electric motor can lift 550 pounds 10 feet and it takes 10 seconds, then the motor has a horsepower rating of 1 hp.
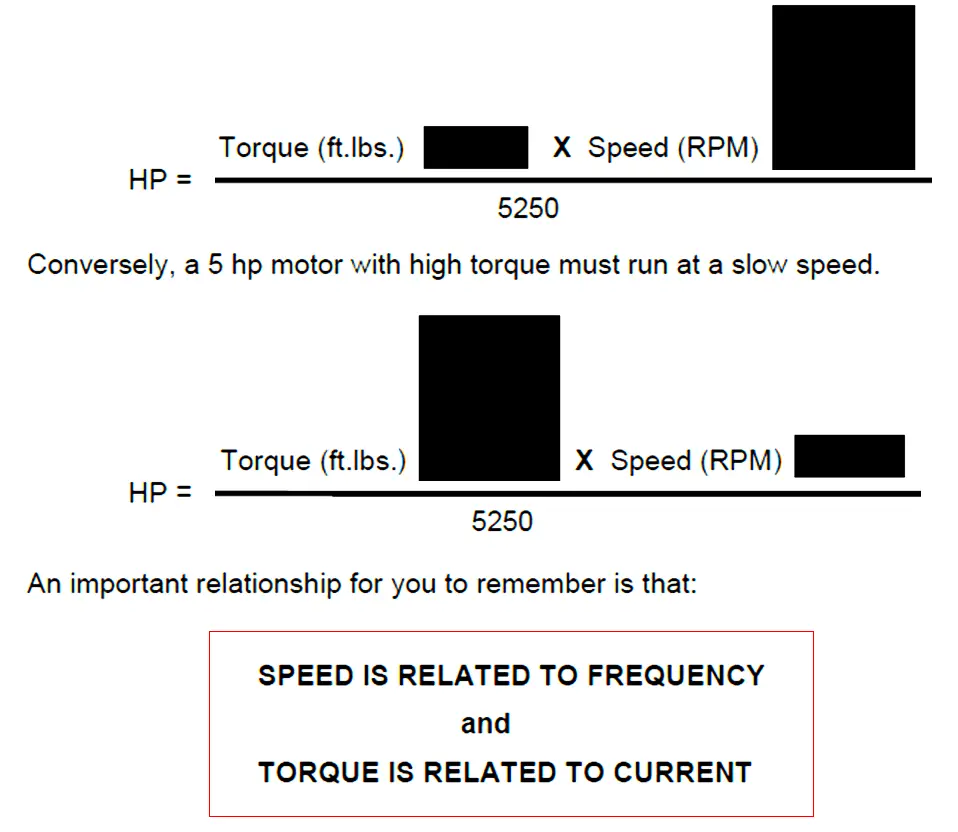
In any electric motor, the motor torque can be multiplied by the motor speed and the product divided by 5250 (a constant) to determine the rated horsepower.
HP = (Torque x Speed) / 5250
Here torque in ft.lbs and speed in rpm
Before continuing the discussion about the horsepower equation, let’s look at torque. Torque is formally defined as: “the force tending to rotate an object, multiplied by the perpendicular radius arm through which the force acts.”
In the case of a motor, torque is the force that acts on the shaft and causes rotation. Remember that the amount of torque created is directly related to the amount of current applied to the motor. The greater the current the stronger the magnetic fields of the stator and rotor, and therefore the greater the turning force of the shaft.
A motor is a dumb device. As the load is increased on the shaft, the motor will draw more current (to increase the torque) to try and keep the load moving. If the load were to continue to be increased, the motor will literally destroy itself trying to create the necessary torque to move the load.
Consider how a motor generates torque vs. how it generates Speed. Motor speed is measured in rpm (the revolutions per minute the rotor turns) and is the speed at which the rotor rotates inside the stator.
This rotational speed will depend upon the frequency of the AC voltage applied and the number of stator poles. If the motor has no load, this speed will approach the synchronous speed of the stator field.
Synchronous Speed
It is the speed of an AC induction motor’s rotating magnetic field. It is determined by the frequency applied to the stator and the number of magnetic poles present in each phase of the stator windings.
This can be expressed by the formula:
Synchronous Speed = (120 x Frequency) / Number of Poles
For example, for a 4-pole motor with a 60 Hz frequency
Synchronous Speed = (120 x 60) / 4 = 1800 RPM
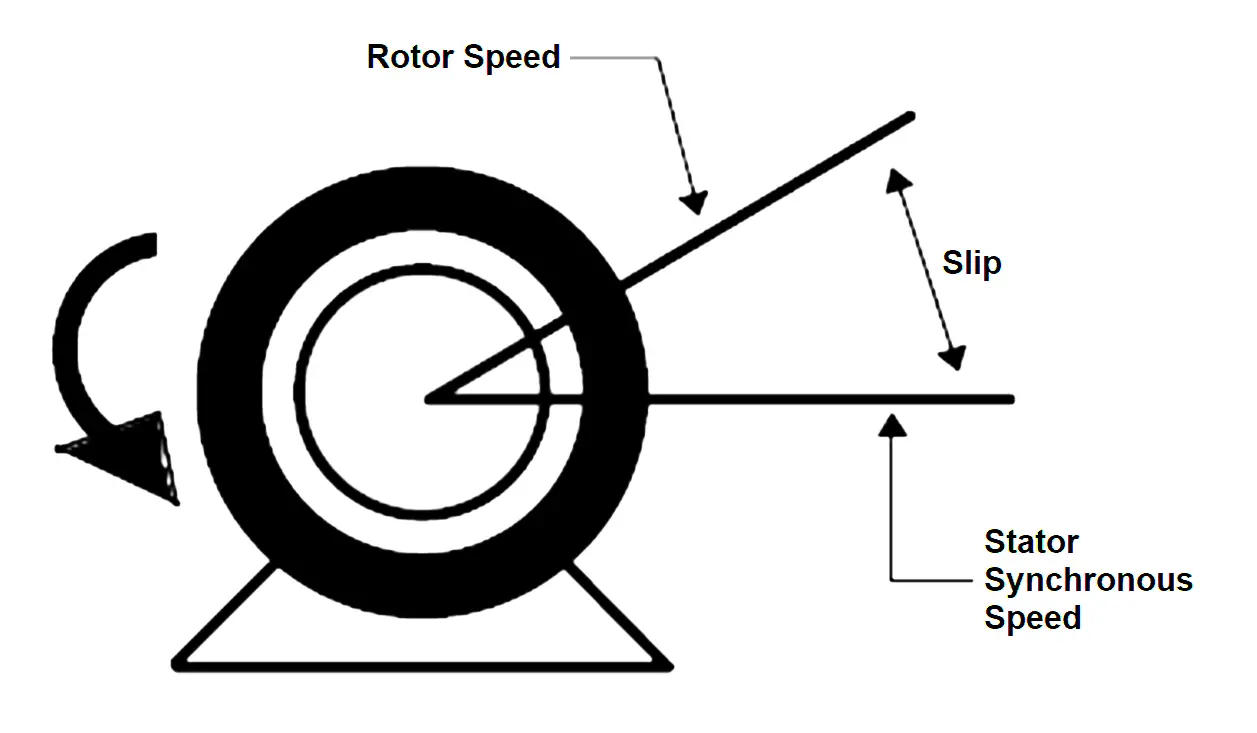
Motor Slip
Slip is the difference between the rotating magnetic field speed in the stator and the rotor speed in AC induction motors. This is usually expressed as a percentage of synchronous speed.
Slip = [(Synchronous Speed – Rotor Speed) / Synchronous Speed] x 100
Slip = [(1800 RPM – 1750 RPM) / 1800 RPM] x 100
Slip = 2.78 %
If the rotor were rotating at exactly the same speed as the stator’s rotating magnetic field (for example, 1800 rpm) then no lines of magnetic force would be cut, no voltage would be generated in the rotor and no current would be present.
However, if the rotor slows down by 50 rpm it would now be running at 1750 rpm vs 1800 rpm of the stator field. The rotor bars are now cutting the rotating field at a 50 rpm rate.
Now voltage and current would be generated in the rotor, with a resulting magnetic flux pattern. The interaction of these magnetic fields would produce torque. The difference between the synchronous and actual rotor speeds is called slip.
Torque versus Speed Relationship
Torque, remember is a force exerted on the motor’s shaft when a load is added to the rotor. The tendency is for the rotor to slow down, which will create more slip (difference between the stator magnetic field speed and rotor speed), thus creating more torque within the motor.
As the load is increased, the rotor will continue to slow down, which would result in even greater slip as the rotor lags behind the synchronous speed of the rotor. The increased resistance to rotation increases the slip and therefore increases the torque.
Now, let’s go back to the horsepower formula:
HP = (Torque x Speed) / 5250
Here torque in ft.lbs and speed in rpm
This formula will help you select the proper motor for a job. Notice the relationship between torque and speed. It is obvious that a 5 HP motor, designed to run at high speed, will have very little torque. To maintain the equation, torque must decrease as speed increases:
You’ve already seen that increasing the frequency at which the magnetic fields change will cause an increase in the speed of rotor and shaft rotation. If the frequency were decreased, the motor speed would slow down.
If the current drawn by the stator and rotor is increased, this would cause a strengthening of the magnetic fields. This, in turn, would cause the torque generated by the motor to increase. Likewise, if the current were decreased, the torque would be decreased as well.
In fact, the horsepower formula can also be expressed in electrical terms of voltage and current, as:
HP (Output) = (Volts x Amps x 1.732 x Power Factor x Efficiency) / 746
Motor Load
A motor provides the conversion of electrical energy to mechanical energy that enables a machine to do work. The energy that a machine requires from a motor is known as the motor load.
For example, the motor in a clothes dryer turns the dryer drum. The energy required by the dryer motor to turn the drum is called the dryer’s motor load.
Motor Overload
An electric motor for all its other fine qualities has no intelligence and will literally work itself to death. If there is a heavy load on a motor, say when the clothes dryer is full of clothes, the motor will try to produce whatever torque is needed to keep the dryer drum turning.
Because the motor load may be increased above normal, a motor overload condition exists. More torque is required from the motor to turn the drum, so the motor draws more current to produce more energy.
The higher-than-normal current flow, which is above the FLC, increases the temperature in the dryer motor. The electric motor could be damaged when the temperature rises above its designed limit.
Motor Cooling
Whenever an electrical current is passed through an electrical motor there is a buildup of heat. The amount of heat produced is a function of the work, or loading, done by the motor; the type of electrical signal being sent to the motor; and the eventual changes due to bearing wear and friction.
Whenever AC drives are used to control motors it means that the speed of the motor is going to be changed. And, depending upon motor loading, special attention needs to be given to how the motor is going to be cooled. Generally speaking, less speed means less cooling.
In this way, we understand the general terms and concepts related to a motor.
If you liked this article, then please subscribe to our YouTube Channel for Electrical, Electronics, Instrumentation, PLC, and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:
- Induction Motor Over Voltage
- What is a Power Transformer?
- Core and Shell Transformers
- Importance of Neutral Wire
- Single and Multi-Core Cables