In this article, we will learn why motor control is required in control systems and the types of motor speed control methods.
Why is Motor Control Required?
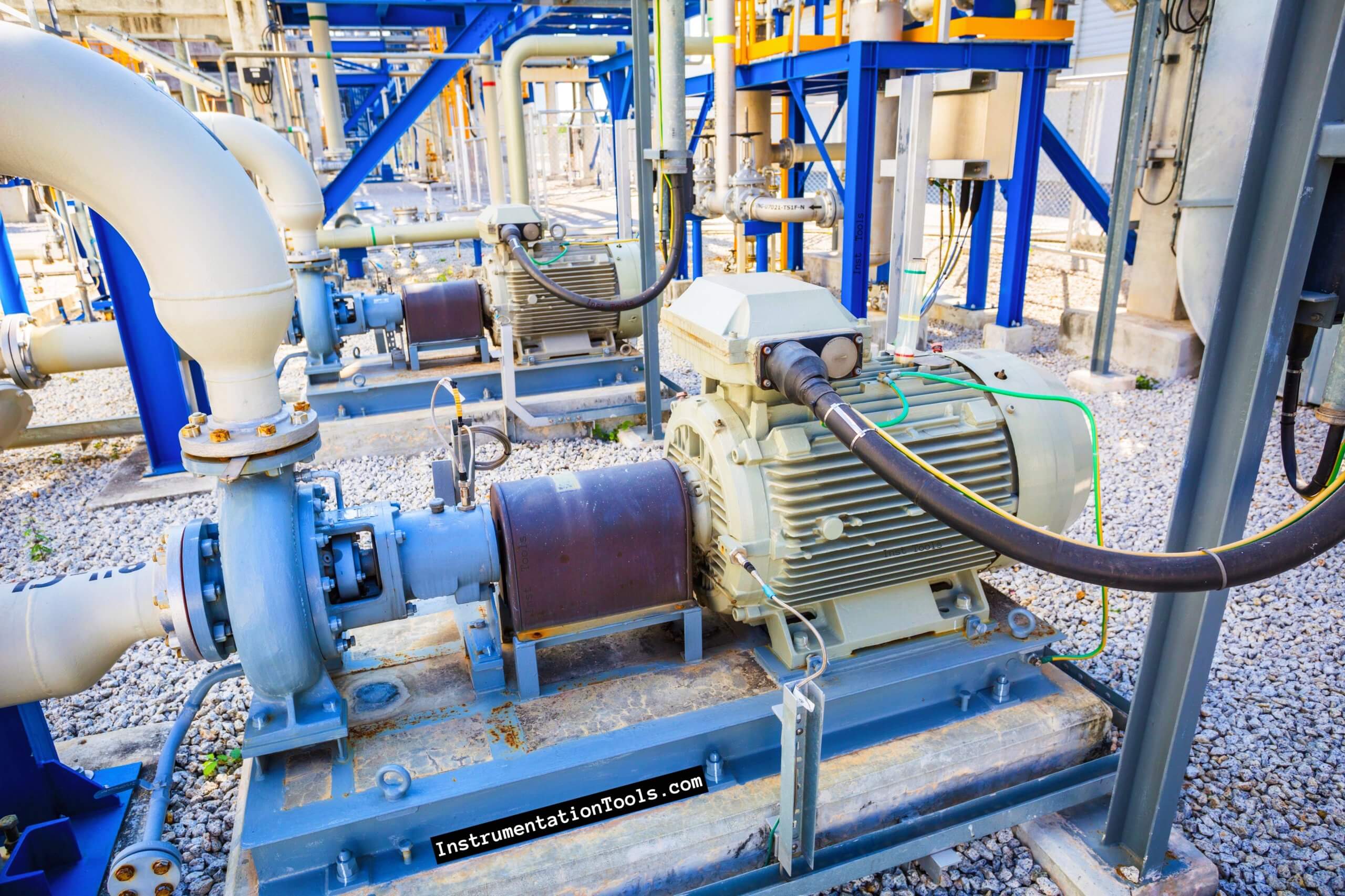
All electric motors require a control system. That control may be as simple as an ON/OFF switch, such as for an exhaust fan. Or, the operation may be so complex that a computer must be used in the control system, such as in an automobile assembly plant application.
Both the exhaust fan and assembly plant electric motors are provided with start and stop control by their control systems. But the difference between their control systems is how they provide that control.
In addition to the start/stop control, a motor control system may also provide motor overload protection as well as motor speed and torque regulation.
There is a very comprehensive line of control products such as motor starters, contactors, switches, disconnects, etc. These products are used in applications that include on/off controls with a jog and reverse capabilities for pumps, compressors, fans, conveyors, meat cutters, textile looms, and wood and metalworking machines, just to name a few.
Sometimes these types of control devices (switches, contactors, etc.), are called “across-the-line” starters. This is because full voltage and current are applied directly to the motor.
An AC motor when switched ON like this tends to run at its maximum rated speed and torque. For many applications, this is a perfectly acceptable situation.
Motor Problems
But there can be problems:
- The locked rotor current (also called “inrush current”) for a motor during starting can be six to thirteen times the normal operating current. This can cause problems if the electrical distribution system is already loaded near capacity because excessive current draw can cause interruption of the whole system. The excessive starting current (multiplied by the number of motors in the facility) can cause the demand factor on the electric meter to become very large which may double or triple the electric bill.
- Another problem created by large locked rotor currents is the wear and tear on the switchgear. When motors are allowed to draw maximum current, they can cause arcing and heat buildup that stresses contacts and switchgear. This stress causes equipment such as disconnects, and motor starters to wear out prematurely.
- A problem may also arise when loads are started at full torque. The starting torque of a squirrel cage motor can be as high as 140 percent of the normal operating torque. Sudden starting torque can damage the equipment or in the case of a conveyor, spill the materials being conveyed.
- It may also be important to control the time it takes a motor to stop. In some applications, it is important that the load stop at exactly the time and location when the motor is de-energized. In normal motor operation, when a motor is de-energized, the load is allowed to coast to a stop, which means that the larger the load is, the longer the coasting time. This causes the load to be located at random, which may be unacceptable in certain applications. For example, if large cutting blades are turning at high speeds and are allowed to continue rotating after power is removed, then an unsafe condition could exist.
Because of one or more of these concerns, over the years, various methods have been tried to exert some control over motors.
Types of Motor Speed Control
Some of the types of adjustable speed control that have been used are:
Mechanical Methods
Mechanical methods involve using devices such as brakes, clutches, and gearing to control motor speed. As you can imagine, these methods are not particularly efficient.
Hydraulic Transmission Control
Physically the configuration includes a torque converter. This method is not used widely today. It has infinite speed control and moderate cost, but it has complex installation and high maintenance.
Electro-Mechanical Speed Control
A combination of mechanical and electrical controls is used. This method of control has fallen from the current favorite because it is very inefficient. It is simple and moderate cost, easy to maintain.
But it has discrete incremental control only. It uses wound-rotor motors which are usually non-stock, creating higher expenses and more maintenance problems.
Eddy Current
A magnetic clutch is used to adjust motor output speed in infinite increments. It is a simple idea, and it works.
However, it is very inefficient and a lot of energy is lost through heat. It is simple, but has poor efficiency and requires cooling, either by water or air.
Electronic Speed Control (AC drives)
Direct electronic controls are used most often to control speed. It has the most efficient speed control, low maintenance, and is the most flexible.
It can be expensive at initial purchases but saves money over time. Energy savings and reduced wear and tear on machinery will quickly repay the initial investment.
In this way, we understand why motor control is required in control systems.








This information is good for us who are ready to become proficient Engineers