Before 4-20 mA the signals were 3-15 psi and 10-50 mA. These signals all have a “live zero” (3 psi, 10 mA, and 4 mA) rather than a “dead zero” (0 psi, 0 mA) which can be used to detect a severed pneumatic tube or signal wire.
The live zero can also be used to power a 2-wire loop-powered device. 3-15 psi, 10- 50 mA, and 4-20 mA etc. all have a ratio of 1:5 (20% bias).
Nobody remembers the exact reason why the signal ranges 3-15 psi, 10-50 mA, and 4-20 mA were selected and there appears to be no definite source documenting this decision such as minutes of meeting from a standards committee.
Some research has uncovered the following technical reasons why these signal ranges were chosen.
3-15 psi Pneumatic Signal
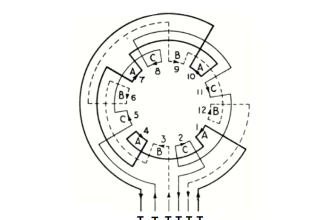
Pneumatic instruments operate on the flapper-nozzle (baffle-nozzle) principle. It appears 3-15 psi with the 1:5 ratio was chosen because it the most linear portion on the curve for the movement of the flapper (baffle) and the backpressure resulting in the nozzle.
10-50 mA Analog Electronic Signal
Early analog electronic instruments used magnetic amplifiers. 10 mA live zero was chosen as it is the lowest at which instrument based on magnetic amplifiers could operate. Maintaining the 1:5 ratio the signal was chosen 10-50 mA.
4-20 mA Analog Electronic Signal
With the introduction of the transistor, it became possible to make devices operating on 4 mA. Thus the signal was chosen 4-20 mA maintaining the 1:5 ratio. With the introduction of microprocessors in instrumentation and digital communication, the HART protocol was introduced superimposed over the 4-20 mA signal.
The HART commands supported by the device, how device information is displayed, and the wizards to make tasks like calibration easy, etc.
Also, Click here to read the advantages of the 4-20mA signal.
Source: Eddl.Org







Why we use a standard of 4-20 mA ?
A 4-10mA corresponds to a 1-5V analog voltage across a 250 Ohm resistor, making it easy to adapt the 4-20mA current loop to a 1-5VDC analog input voltage (common on many controllers using TTL inputs) to by simply placing a 250 Ohm resistor across the analog input terminals of the controller.
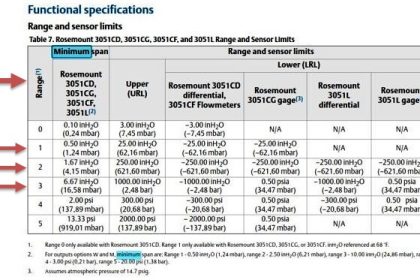
The industry specification for Compatibility of Analog Signal for Electronic Industrial Process Instruments is ISA 50.00.01-1975 (R2012). The pre-1972 version of this standard specified 10-50mA for analog current loops because the technology at the time used magnetic amplifiers which required a minimum of 10mA to operate.
Since transistor circuits have become more stable and accurate, the 4-20mA analog current loop has become the standard, requiring less power and allowing greater distances.
Of course, if you aren’t already aware, one of the main advantages of current loop over voltage driven analogue signals is that a current driven loop allows greater distances to be achieved – typically lengths up to 1000m are possible.
Any signal sent over a long distance produces a voltage drop which is in proportion to the length of the cable (cable resistance), however when a 4-20mA signal is used to transmit the analog signal (as opposed to a 1-5VDC signal), the voltage drop is irrelevant, since the same current has to pass through the circuit loop (it has no where else to go!) provided the power supply can handle it. For example, for a 24VDC powered transmitters, 7-15VDC is typically used by the transmitter circuit, leaving a budget of at least 9VDC for the loop voltage drop.
You may already be aware that having a non-zero current (4mA) for representing the “zero value” of the analog signal allows the controller to detect a broken wire (0mA) as well as allowing loop-powered transmitter design.
Having the 20mA correspond to the ‘maximum value’ of the analog signal is practical for industrial process instruments, since having larger currents would result in larger voltage drop for the same size cabling, thereby limiting the cable length.
Also, limiting the power of signals in the transmitter is better for ‘intrinsically safe design’ by limiting the energy available for igniting explosive dust or vapors in hazardous areas (as per ANSI/ISA-RP12.06.01-2003 Recommended Practice for Wiring Methods for Hazardous (Classified) Locations Instrumentation Part 1: Intrinsic Safety).
Source : stackexchange