When you design a SCADA or HMI system, there are instances when many screens tend to repeat themselves, due to the same information everywhere.
For example, if there are 10 motors and every motor has the same information in it, many programmers create 10 different screens for them. But, there also comes a feature in HMI or SCADA, called a faceplate. It is a common screen where you have to indirect address the motors by linking the variables, and the corresponding motor data will be communicated. You need not have to create multiple screens for them.
A motor is the most commonly used equipment in industrial automation, and it is important to see how you design a motor faceplate in the graphics. This can help the user provide relevant information.
In this post, we will learn how to design a motor faceplate in SCADA or HMI graphics.
What is a Faceplate?
First of all, let us understand what a faceplate is. A faceplate can be termed as a common screen or popup, in which indirect addresses are defined. Whenever you call one faceplate of an object, its corresponding values are moved and shared with the faceplate. And when you call the faceplate of suppose the fourth object, then its corresponding values are moved and shared with the faceplate.
In short, the SCADA screen is the same; just need to create multiple instances and tag the corresponding variables in it. Whenever an instance is called, the tags in it are shared with the faceplate. This reduces the need to design multiple screens and popups for the same.
Because you create only a single screen or popup, the programming size also reduces, and indirectly, the programming work also reduces. Because, if suppose there are 20 objects having the same data to be shared; then there is no use to create 20 screens or popups of the same. It is an utter waste of time and energy. Instead, just create a single screen and link internal variables in it. These internal variables will be overwritten by external variables upon calling it through any instance.
This concept is very similar to a library you create in PLC programming. When the logic is the same for many types, you just create a single library for that type, instead of writing the logic multiple times. This saves time and energy in writing logic.
Motor Faceplate Design
Refer to the below image for understanding. As you can see, all the general information is present in the faceplate.
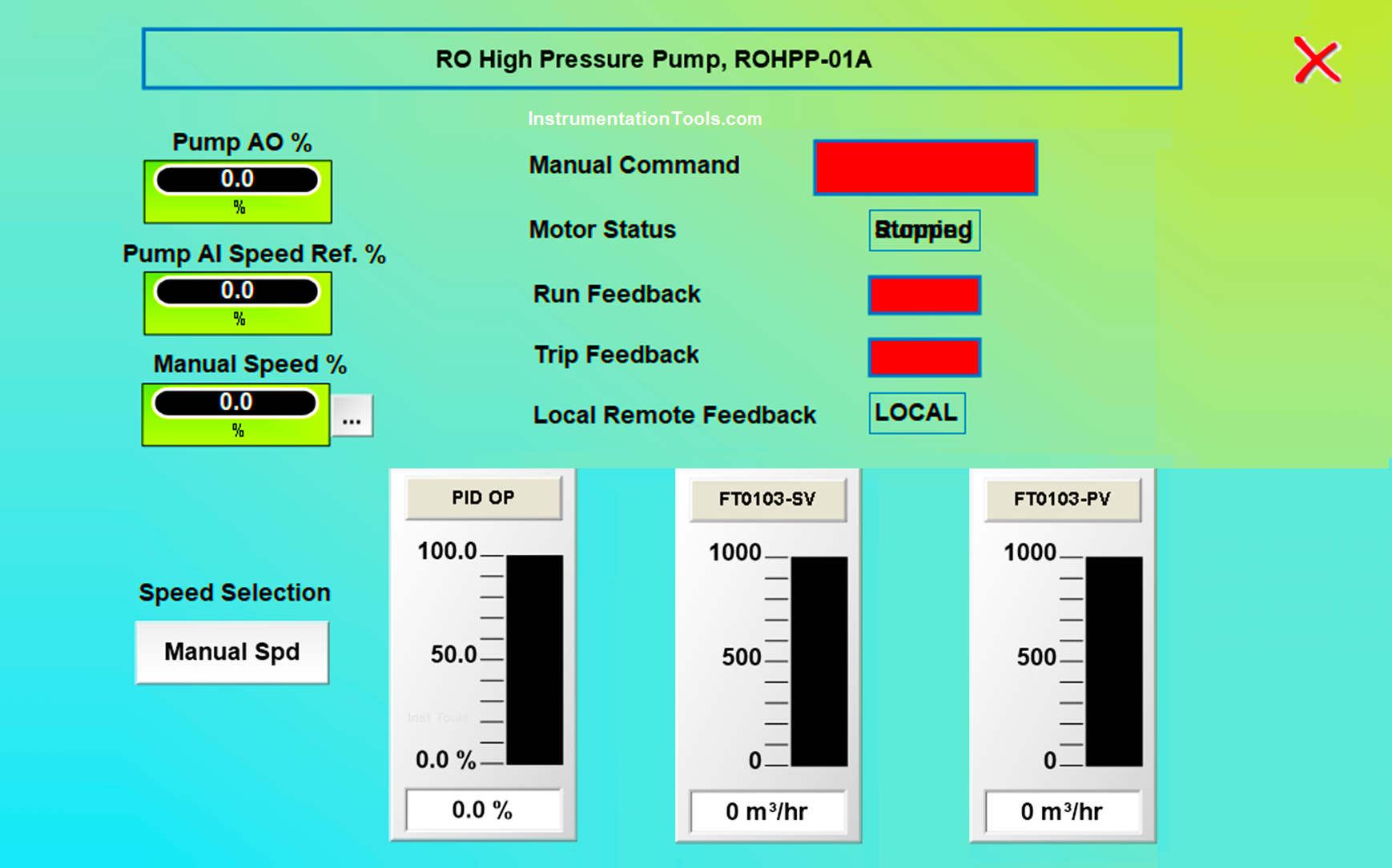
Let us have a look at some of the most common data that can be shown in the popup:
- Title – This is the first and foremost data required in the faceplate. In the image, the title name is given as RO High-Pressure Pump, ROHPP-01A. This is important because it shows which motor faceplate has been opened by the user.
- Manual Command – This button is used to turn on the motor in manual mode. Instead of providing a separate screen for turning on all the motors, just give this button in the faceplate and you can individually control all the motors from here.
- Motor Status – This status is used to show whether the motor is running or stopped.
- Run Feedback – This feedback comes from the motor contactor or thermal overload relay. It shows whether the motor is running or stopped.
- Trip Feedback – This feedback too comes from the electrical panel and is used to denote whether the motor is tripped or not.
- Local Remote Feedback – MCC panels mostly have a local/remote switch in them. It gives the option to either run the motor locally through the electrical panel or run the motor through PLC logic in a remote way. This switch feedback is thus used to denote whether the motor is in local or remote mode.
- Pump Analog Output – If the pump has an analog output for speed control, then this information shows how much the current analog output is given by the PLC to the motor.
- Pump Speed Reference – When an analog input is taken in the PLC from the motor, this data is used to how much is the current speed of the motor.
- Manual mode speed – This setting is used to feed the motor with a fixed speed in manual mode.
- Speed selection – This selection is used to define the speed operation in either auto or manual mode. In manual mode, the motor will take manual mode speed reference, and in auto mode, the motor will take reference from either PID or some other type of logic written.
- PID values of set and current – If PID logic is used for motor speed control, then this shows the PID reference set value, current value, and also the PID output from the motor.
These are some of the most general types of data shown in the motor faceplate. There are other data too, like alarm status, running hour status, motor temperature, or energy consumption data. It varies on programmer to programmer and what is the client requirement.
If you liked this article, then please subscribe to our YouTube Channel for Instrumentation, Electrical, PLC, and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:
- Overview of SIEMENS PLC
- HMI and VFD Control System
- Sequential PLC Pneumatic Valves
- HMI Screen Design for Hazardous
- S7-1200 Hardware Configuration