Encoders are used to translate rotary or linear motion into a digital signal. Usually this is for the purpose of monitoring or controlling motion parameters such as speed, rate, direction, distance or position.
Encoder Working Principle
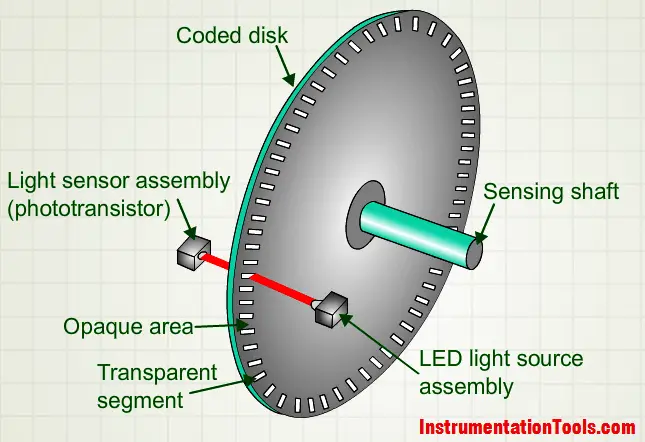
The Optical Encoders typically consist of a rotating and a stationary electronic circuit. The rotor is usually a metal, glass, or a plastic disc mounted on the encoder shaft. The disc has some kind of optical pattern, which is electronically decoded to generate position information.
The rotor disc in absolute optical encoder uses opaque and transparent segments arranged in a gray-code pattern. The stator has corresponding pairs of LEDs and photo-transistors arranged so that the LED light shines through the transparent sections of the rotor disc and received by photo-transistors on the other side. After the electronic signals are amplified and converted, they are then available for the evaluation of the position
What does the word encoder mean?
What does the word encoder mean? The encoder is an electromechanical device that can measure displacement. Encoders are normally digital displacement transducers, consisting of a mechanical element and a sensing head, typically of optical type.
The mechanical element can be a disc (for rotary type encoders) or a ruler (for linear type encoders) with deposited or carved patterns. The sensing head includes a light source (LED) and a light sensor (photo detector) to read the generated code (the encoder output).
How can the disc angle rotation be measured?
With this encoder, the displacement is obtained by counting the number of times that transitions occur between logical values “0” and “1”. This allows the transformation of physical quantities by converting the angular displacement variations into electrical type signal output that is translated into logical values by suitable electronics.
The counting of the number of transitions that occur in the (reflective / opaque and non-reflective / transparent) disc sectors is related to the concept of resolution.
The resolution may be defined as the smallest change in a quantity under measurement that causes a noticeable change in the corresponding outcome. In this case, the resolution of the disc corresponds to its minimum angular variation that causes a transition at the logical output level. As there are nine 0 to 1 transitions in a complete rotation of the disk.
What different types of encoders exist?
The most widely used classification refers to the type of movement (linear or rotary). In both cases they can be incremental, semi-absolute or absolute.
Incremental information is obtained by simply counting the pulses. Therefore, it depends on the previous state and the value of the transition. Its biggest drawback consists in the need for defining a starting position reference: this information is lost whenever the system is powered down or is turned off.
In contrast, in absolute encoders (of angular or linear type) each position is properly referenced with a unique code, Above Figure, corresponding to a unique pattern of bits in the various tracks. So, the position is always known and it is not necessary to define a reference if the system is powered down or is turned off.
The semi-absolute encoders are typically rotary and are used when it is necessary to measure displacements that exceed the measuring range of the absolute encoder. In this case it is necessary to use an additional procedure to count the number of disc turns during the measurement.







Sir I want to work under your supervisory.
If this is possible then there will be no demand to god from me.
Hi, Right now there are no vacancy here, will be intimate if any available. Thank You.
Sir if there are any vacancy then please inform me sir through
Phn 7407291837
Or my email id
Waiting for response sir
I need circular angle encoder
0 to 360 degree
Text me what’s app +917299853857
What is the communication encoder