When you are working on any motion control application like encoder, servo, or stepper motor, you must know their common and generally used commands for operating them. This ensures a very safe operation for them.
Motion Control Commands

If you do not know them, then there are chances that you will miss their safe and efficient operation by skipping some of their fundamental principles. So, it is necessary to understand these commands irrespective of which hardware or software you are using. It is the same on all the platforms.
Once you know the commands, you can then design a program starting from initiating to moving to stopping it. In this post, we will see the fundamental motion control commands.
Enabling a motion command
Suppose you have installed an encoder in a system for cutting metal sheets. When the system is off for any reason, then the encoder pulses should not be counted by the PLC, irrespective of whether the encoder wheel has moved even a little or not accidentally. If it is counted, then the wrong data will be given to the programmer. So, to enable or disable motion commands, this instruction is used in PLC.
Due to this, the programmer will accurately be able to decide when to start or stop motion commands. As motion is used in machine applications and where the highest accuracy is required, a slight bug in motion counts will hamper the accuracy. This command can be simply explained as power on or off.
Resetting a motion command
There is a stage where the motion count needs to reset for the next cycle of counting. For this purpose, the function of the reset command is used. The reset command clears the current motion counts, as well as resets any alarms present in the command.
Basically, it gives a fresh state of motion command to the programmer. Also, there can be a simple application where after certain counts, it should be restarted from zero for the next cycle, and cannot be continued from where it was held. So, the reset command plays a very important role.
Homing a motion command
In some applications, it is required that the process starts from its home position once the task has been completed. This means, that if the home position is set at 500 mm, then irrespective of the current position where the motion has stopped and completed its process, the motion must travel in the corresponding direction to reach 500 mm. This is called a homing command and is basically a reference position for the controller.
It helps the programmer to decide how his cycle is working in every task by determining the distance between the home position and the current position. So, when you give the home command, the motion travels all the way in the desired axis to this reference position and stops. After that, it is again ready for the next cycle.
Moving a motion command
Once the motion has been readied for operation, the next task will be to give start command and moving speed reference. The start command comes in two types – pulse output or continuous mode output. The speed reference comes in three types – PTO, speed, and torque.
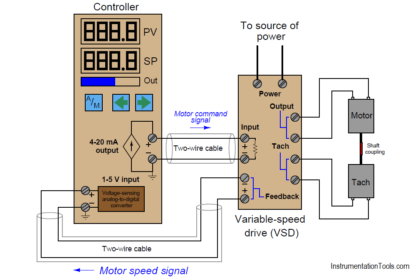
In PTO, a train of pulses is sent at a set frequency and time period. This is the most accurate method of speed control. In speed control, an analog voltage of 4-20 mA or 0-10 V is given to the servo or stepper motor drive.
Torque control is a method where the speed is varied automatically according to the torque applied to the motor. Torque feedback is read continuously and if it is found that the motion is becoming tight or loose now, then the speed is varied accordingly.
Jogging a motion command
There are times when there arises a need to manually check the motion operation and bypass the auto operation. This is done during commissioning or maintenance time.
In this case, a jog command is used where the motor can be started or stopped anytime according to operator intervention. The speed and acceleration/deceleration time can also be varied anytime in between.
Move absolute or move relative command
When you are using PTO mode in motion, there are two types of moving commands – absolute and relative. In absolute mode, the motor moves from a fixed position of one to another at a fixed speed. After that, it stops at that desired position and the count becomes zero. Homing is compulsory in this type.
In relative mode, the motion moves every fixed increment distance. This means suppose it is designated to move every 100 mm. Then, after 100 mm, it will start from 101 to 200. A reset command is thus required in this type. Due to this, you get to know how much total the motion has moved from the start.
Stopping a motion command
In this command, the motion is stopped in between if there is any alarm or if the operator intervenes in between. The deceleration time is important here, as a sudden jerk can hamper the operation.
As soon as the stop command is received, other commands are not allowed to execute this time. It remains active until the velocity becomes zero and the machine has come to a complete stop state.
In this way, we saw the fundamental motion control commands.
Read Next:
- PLC Feedback Monitoring
- Safety Interlock PLC Program
- Fundamentals of Digital Systems
- What is Linear Motion Control?
- Compare Motion Controller and PLC