Fieldbus is a digital two-way multidrop communication link between intelligent field devices. It is a local area network dedicated to industrial automation. It replaces centralized control networks with distributed control networks and links the isolated field devices such as smart sensors/ transducers/actuators/controllers.
Fieldbus
Foundation Fieldbus H1 and PROFIBUS-PA are the two fieldbus technologies used in process control. In this two-way communication, it is possible to read data from the smart sensor and also write data into it. The multidrop communication facility in fieldbus results in enormous cable savings and resultant cost reduction.
A fieldbus device must have a fieldbus interface unit for proper communication to take place, and is shown in Figure.
A comparison between a 4–20 mA system and a fieldbus system is shown in Table.
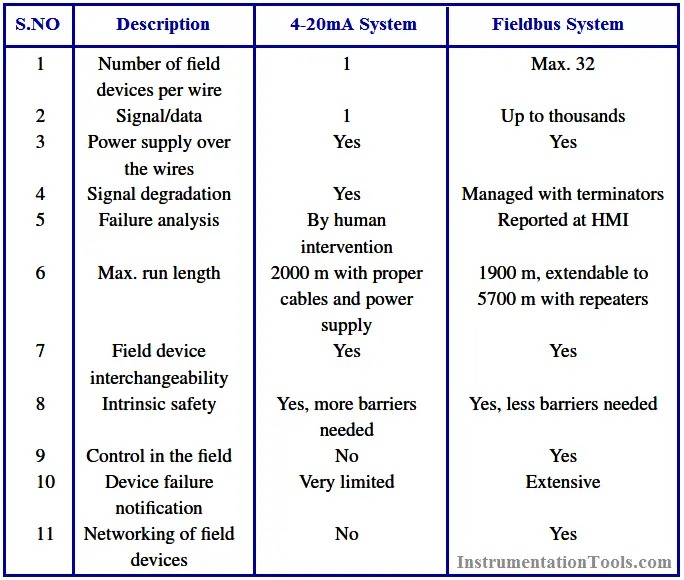
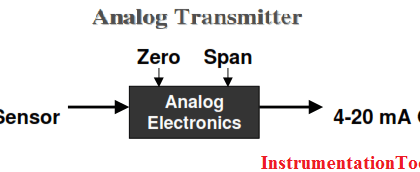
A conventional 4–20 mA current transmission system has two wires each for each of the individual field devices employed.
HART Versus Fieldbus Devices
Compared with this, a fieldbus system has two wires running for many devices that belong to the same segment. A segment may consist of 32 devices.
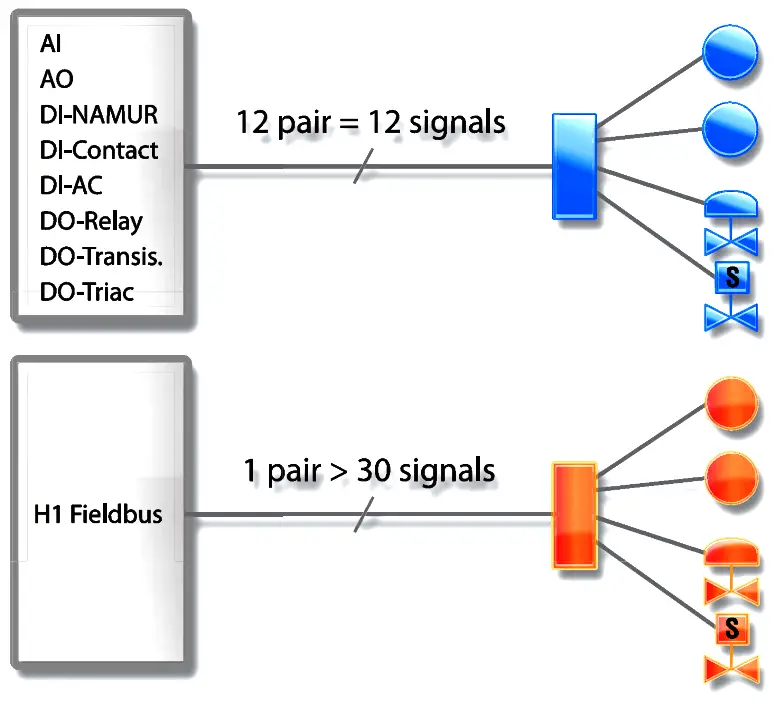
The above Figure shows a conventional point-to-point communication system and its fieldbus counterpart. There are as many wire pairs as the number of field devices for a point-to-point communication system, while it can be only a single wire pair for a fieldbus system.
History
With digital communication making its way into process automation systems several decades back, different vendors started developing their own protocols—independent of each other. In the initial stages of fieldbus introduction, design engineers were confronted with several problems.
First, a particular vendor could not provide all the parts/components needed for a plant and that a particular manufacturer cannot make all the devices better than others. This led to either choosing the less-than-the-best devices from a single manufacturer or else settling for choosing the best devices from different manufacturers.
The latter option would give rise to an integrability problem and lead to isolated islands of automation and consequent inter operability difficulty with devices from different manufacturers.
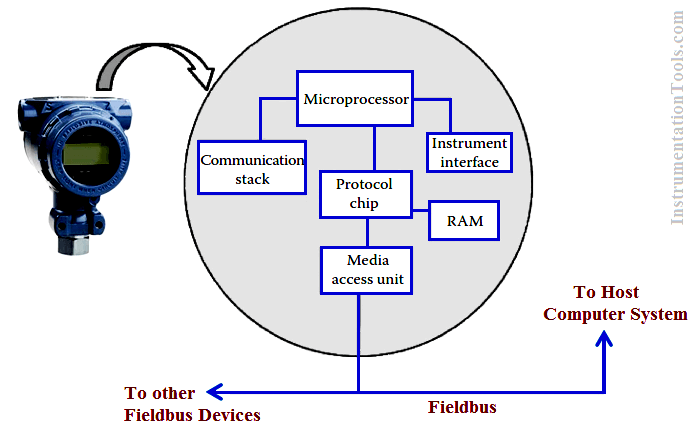
Fig : Fieldbus interface unit in a fieldbus transmitter
Initially when fieldbus was introduced, it suffered from numerous problems such as proprietary protocols, slow transmission speed, and different data formats. Improvements in field signal transmission technology resulted in increasing levels of decentralization.
In 1985, industry experts in the field sat together to work out a vendor independent fieldbus standard—i.e., it would be interoperable. The bus standard would provide bus power, intrinsic safety, and the ability to communicate long distances over existing wires—the basic requirements for a process plant automation system.
Partly due to the complexities of instrumentation automation systems and mostly due to the reluctance on the part of the manufacturers, a single standard protocol architecture is yet to be established. Foundation Fieldbus and PROFIBUS are now the two most dominant fieldbus technologies that are ruling the process automation field. Devices embracing these two technologies cannot communicate with each other because of protocol mismatch and thus seamless interoperability is yet to be achieved.
There are many types of fieldbuses in use today; the particular type to be used depends on the type of industry—discrete or manufacturing automation. Different types of fieldbuses include: Foundation Fieldbus, PROFIBUS, DeviceNet, ControlNet, InterBus, HART, AS-i, MODBUS, CAN Bus, Ethernet, LonWorks, and WorldFIP.
Also See : 4-20mA Versus Fieldbus Animation




Very Easy good for learn about instrumentation.
Very useful and good information, easy to understand too. Since I am in teaching profession, It will be very useful to me