How do instruments and controllers communicate in a process control?
Has it ever came in your mind how instruments and controllers communicate?
We know for a fact that communication may come wired or wireless but with the wast variety of process instruments nowadays how do this instruments work when connected to controllers of a different make.
Communication protocols is what we call the digital message formats and rules required to exchange messages in or between computers and instruments. This is required in process automation.
Industrial Automation Communication Protocols
The following are the different types of communication protocols, its uses and its makers in the field of process automation:
AS-i
an industrial networking solution(physical layer, data access method and protocol) used in PLC, DCS and PC-based automation systems. – AS-International.
BSAP – Bristol Standard Asynchronous Protocol
A master-slave protocol suited to both synchronous high speed local networks and asynchronous low speed wide area networks – Bristol Babcock
CC-Link Industrial Networks
An open industrial network that enables devices from numerous manufacturers to communicate. It is predominantly used in machine, cell or process control applications in manufacturing and production industries, but can also be used in facilities management, process control and building automation. – CLPA Europe
CIP (Common Industrial Protocol)
Encompasses a comprehensive suite of messages and services for the collection of manufacturing automation applications – control, safety, synchronization, motion, configuration and information. Can be treated as application layer common to DeviceNet, CompoNet, ControlNet and EtherNet/IP – ODVA, Inc.
Controller Area Network or CAN bus
a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other in applications without a host computer. Utilised in many network implementations, including CANopen and DeviceNet – Bosch
ControlNet
an open industrial network protocol for industrial automation applications, also known as a fieldbus – Allen-Bradley
DeviceNet
a network system used in the automation industry to interconnect control devices for data exchange.- Allen-Bradley
DF-1 protocol
an asynchronous byte-oriented protocol that is used to communicate with most Allen Bradley RS232 interface modules. DF1 protocol consists of link layer and application layer formats. – Allen Bradley
DirectNet
used by DirectLOGIC PLCs and is used in APS vacuum controls since 1999. It is a master/slave protocol making use of RS-232 or RS-422 physical layers with a baud rate from 300 to 38,400. It is designed to drive a maximum of 90 PLCs on a serial line. – Automation Direct
EtherCAT
an Ethernet-based fieldbus system, invented by The protocol is standardized in IEC 61158 and is suitable for both hard and soft real-time requirements in automation technology. – Beckhoff Automation
Ethernet Global Data (EGD)
a protocol that enables producer (server) to share a portion of its memory to all the consumers (clients) at a scheduled periodic rate. – GE Fanuc PLCs
EtherNet/IP
IP stands for “Internet Protocol”. An implementation of CIP, originally. – Rockwell Automation
Ethernet Powerlink
a deterministic real-time protocol for standard Ethernet.- Ethernet POWERLINK Standardization Group (EPSG).
FINS
provides a consistent way for PLCs and computers on various networks to communicate. Compatible network types include Ethernet, Host Link, Controller Link, SYSMAC LINK, SYSMAC WAY, and Toolbus. – OMRON
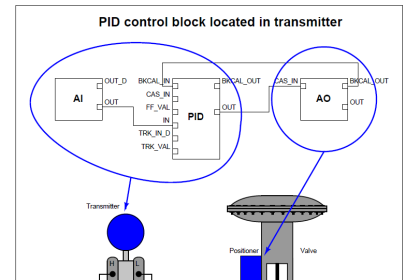
FOUNDATION fieldbus
an all-digital, serial, two-way communications system that serves as the base-level network in a plant or factory automation environment. It is an open architecture. – Fieldbus Foundation.
HART Protocol
(Highway Addressable Remote Transducer) – an early implementation of Fieldbus, a digital industrial automation protocol. Its most notable advantage is that it can communicate over legacy 4-20 mA analog instrumentation wiring, sharing the pair of wires used by the older system. – Rosemount Inc
HostLink Protocol
A communication protocol for use with or between PLC’s made by Omron. It is an ASCII-based protocol generally used for communication over RS232 or RS422. – Omron
Interbus
a serial bus system which transmits data between control systems (e.g., PCs, PLCs, VMEbus computers, robot controllers etc.) and spatially distributed I/O modules that are connected to sensors and actuators (e.g., temperature sensors, position switches). – Phoenix Contact
MACRO Fieldbus
Motion and Control Ring Optical” , – Delta Tau Data Systems.
MECHATROLINK
an open protocol used for industrial automation, originally developed by Yaskawa and presently maintained by Mechatrolink Members Association (MMA) – Yaskawa
MelsecNet
It has two variantsMELSECNET/H and its predecessor MELSECNET/10 use high speed and redundant functionality to give deterministic delivery of large data volumes. Both variants can use eithercoaxial bus type or optical loop type for transmission. – Mitsubishi Electric
Modbus PEMEX
a serial communications protocol for use with its Modicons programmable logic controllers (PLCs). Simple and robust, it has since become a de facto standard communication protocol, and it is now a commonly available means of connecting industrial electronic devices – –Modicon/Schneider Electric
OSGP
The Open Smart Grid Protocol, a widely use protocol for smart grid devices built on ISO/IEC 14908.1 – ETSI
Optomux
Serial (RS-422/485) network protocol. The protocol was openly documented and over time used for industrial automation applications. – Opto 22
PieP
Process Image Exchange Protocol, a very simple Fieldbus protocol used for process automation. It is an application layer protocol developed over TCP/IP
Profibus
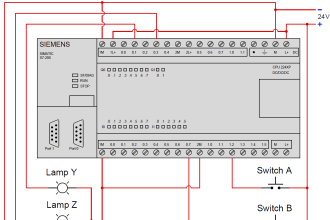
A standard for fieldbus communication in automation technology used by Siemens. –PROFIBUS International.
PROFINET IO
The basic idea of CBA is that an entire automation system can be divided into autonomously operating subsystems.
RAPIEnet
Real time Automation Protocols for Industrial Ethernet , An Ethernet-based industrial networking protocol. – LSIS
Honeywell SDS
Smart Distributed System, an open event-driven protocol used over Controller area network based industrial networks. – Honeywell.
SERCOS interface
a globally standardized open digital interface for the communication between industrial controls, motion devices (drives) and input output devices (I/O). – Sercos International
SERCOS III
Ethernet-based version of SERCOS real-time interface standard
SSCNET
Servo System Controller Network for control of motion and I/O – Mitsubishi Electric
GE SRTP
for transfer of data from PLCs. – GE Fanuc PLCs
Sinec H1
an Ethernet-based protocol that provides the transport layer function– Siemens
SynqNet
an industrial automation network l for meeting the performance and safety requirements of machine control applications. – Danaher
TTEthernet
TTTech, Time-Triggered Ethernet or TTE, a computer network technology for safety-related applications primarily in transportation industries and industrial automation – TTTech Computertechnik AG
MPI
Multi Point Interface, used for connecting the stations programming (PC or personal computer), operator consoles, and other devices in the SIMATIC family. This technology has inspired the development of protocol Profibus. – Siemens.







IP stands for Industrial Protocol or Internet Protocol?
Internet protocol
Mr. Bhardwaj,
Great work. I am an elec & instru engg working at BARC.
One piece of advice, add a print button or print to pdf button.
Will keep in touch through FB. Kindly provide me with your fb profile ID.
_ sayan
There are many types of buses and networks that you might come across in your profession. Each one has its own applications, advantages, and disadvantages.
Short-distance busses :
PC/AT Bus used in early IBM-compatible computers to connect peripheral devices such as disk drive and sound cards to the motherboard of the computer.
PCI Another bus used in personal computers, but not limited to IBM-compatibles. Much faster than PC/AT. Typical data transfer rate of 100 Mbytes/second (32 bit) and 200 Mbytes/second (64 bit).
PCMCIA A bus designed to connect peripherals to laptop and notebook sized personal computers. Has a very small physical “footprint,” but is considerably slower than other popular PC buses.
VME A high-performance bus (co-designed by Motorola, and based on Motorola’s earlier Versa-Bus standard) for constructing versatile industrial and military computers, where multiple memory, peripheral, and even microprocessor cards could be plugged in to a passive “rack” or “card cage” to facilitate custom system designs. Typical data transfer rate of 50 Mbytes/second (64 bits wide).
VXI Actually an expansion of the VME bus, VXI (VME eXtension for Instrumentation) includes the standard VME bus along with connectors for analog signals between cards in the rack.
S-100 Sometimes called the Altair bus, this bus standard was the product of a conference in 1976, intended to serve as an interface to the Intel 8080 microprocessor chip. Similar in philosophy to the VME, where multiple function cards could be plugged in to a passive “rack,” facilitating the construction of custom systems.
MC6800 The Motorola equivalent of the Intel-centric S-100 bus, designed to interface peripheral devices to the popular Motorola 6800 microprocessor chip.
STD Stands for Simple-To-Design, and is yet another passive “rack” similar to the PC/AT bus, and lends itself well toward designs based on IBM-compatible hardware. Designed by Pro-Log, it is 8 bits wide (parallel), accommodating relatively small (4.5 inch by 6.5 inch) circuit cards.
Multibus I and II Another bus intended for the flexible design of custom computer systems, designed by Intel. 16 bits wide (parallel).
CompactPCI An industrial adaptation of the personal computer PCI standard, designed as a higher-performance alternative to the older VME bus. At a bus clock speed of 66 MHz, data transfer rates are 200 Mbytes/ second (32 bit) or 400 Mbytes/sec (64 bit).
Microchannel Yet another bus, this one designed by IBM for their ill-fated PS/2 series of computers, intended for the interfacing of PC motherboards to peripheral devices.
IDE A bus used primarily for connecting personal computer hard disk drives with the appropriate peripheral cards. Widely used in today’s personal computers for hard drive and CD-ROM drive interfacing.
SCSI An alternative (technically superior to IDE) bus used for personal computer disk drives. SCSI stands for Small Computer System Interface. Used in some IBM-compatible PC’s, as well as Macintosh (Apple), and many mini and mainframe business computers. Used to interface hard drives, CD-ROM drives, floppy disk drives, printers, scanners, modems, and a host of other peripheral devices. Speeds up to 1.5 Mbytes per second for the original standard.
GPIB (IEEE 488) General Purpose Interface Bus, also known as HPIB or IEEE 488, which was intended for the interfacing of electronic test equipment such as oscilloscopes and multimeters to personal computers. 8 bit wide address/data “path” with 8 additional lines for communications control.
Centronics parallel Widely used on personal computers for interfacing printer and plotter devices. Sometimes used to interface with other peripheral devices, such as external ZIP (100 Mbyte floppy) disk drives and tape drives.
USB Universal Serial Bus, which is intended to interconnect many external peripheral devices (such as keyboards, modems, mice, etc.) to personal computers. Long used on Macintosh PC’s, it is now being installed as new equipment on IBM-compatible machines.
FireWire (IEEE 1394) A high-speed serial network capable of operating at 100, 200, or 400 Mbps with versatile features such as “hot swapping” (adding or removing devices with the power on) and flexible topology. Designed for high-performance personal computer interfacing.
Bluetooth A radio-based communications network designed for office linking of computer devices. Provisions for data security designed into this network standard.
Extended-distance networks :
20 mA current loop : Not to be confused with the common instrumentation 4-20 mA analog standard, this is a digital communications network based on interrupting a 20 mA (or sometimes 60 mA) current loop to represent binary data. Although the low impedance gives good noise immunity, it is susceptible to wiring faults (such as breaks) which would fail the entire network.
RS-232C The most common serial network used in computer systems, often used to link peripheral devices such as printers and mice to a personal computer. Limited in speed and distance (typically 45 feet and 20 kbps, although higher speeds can be run with shorter distances). I’ve been able to run RS-232 reliably at speeds in excess of 100 kbps, but this was using a cable only 6 feet long! RS-232C is often referred to simply as RS-232 (no “C”).
RS-422A/RS-485 Two serial networks designed to overcome some of the distance and versatility limitations of RS-232C. Used widely in industry to link serial devices together in electrically “noisy” plant environments. Much greater distance and speed limitations than RS-232C, typically over half a mile and at speeds approaching 10 Mbps.
Ethernet (IEEE 802.3) A high-speed network which links computers and some types of peripheral devices together. “Normal” Ethernet runs at a speed of 10 million bits/second, and “Fast” Ethernet runs at 100 million bits/second. The slower (10 Mbps) Ethernet has been implemented in a variety of means on copper wire (thick coax = “10BASE5”, thin coax = “10BASE2”, twisted-pair = “10BASE-T”), radio, and on optical fiber (“10BASE-F”). The Fast Ethernet has also been implemented on a few different means (twisted-pair, 2 pair = 100BASE-TX; twisted-pair, 4 pair = 100BASE-T4; optical fiber = 100BASE-FX).
Token ring Another high-speed network linking computer devices together, using a philosophy of communication that is much different from Ethernet, allowing for more precise response times from individual network devices, and greater immunity to network wiring damage.
FDDI A very high-speed network exclusively implemented on fiber-optic cabling.
Modbus/Modbus Plus Originally implemented by the Modicon corporation, a large maker of Programmable Logic Controllers (PLCs) for linking remote I/O (Input/Output) racks with a PLC processor. Still quite popular.
Profibus Originally implemented by the Siemens corporation, another large maker of PLC equipment.
Foundation Fieldbus A high-performance bus expressly designed to allow multiple process instruments (transmitters, controllers, valve positioners) to communicate with host computers and with each other. May ultimately displace the 4-20 mA analog signal as the standard means of interconnecting process control instrumentation in the future.
It is useful to note that most instrument communication has multiple layers and interfaces that range from the lowest hardware timing and voltage up through a very high-level abstracted interface. CANbus, for example, has several fundamental layers defined, such as voltages, data rates, bit-stuffing, and packet ID definition at the silicon implementation level, up to high-level implementation such as CANopen. Many instrument manufacturers provide drivers and interfaces to completely abstract the hardware so that the details of the communication (RS-232, USB, CANbus) are hidden from the user and a uniform interface is presented.
When implementing a distributed system, the hardware choice depends on consideration of speed, RFI tolerance, EMC, distance, expandability, topology (particularly a multi-drop system such as RS-488, CANbus, vs a star system such as Ethernet). The high-level interface depends on what software is required to control or monitor. A vendor supplied GUI may be sufficient, or a complex multi element system may work better with SCPI commands.