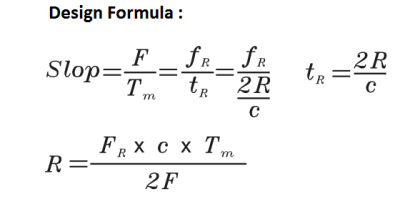
A radar signal is emitted via an antenna, reflected on the product surface and received after a time t. The radar principle used is FMCW (Frequency Modulated Continuous Wave). The FMCW-radar transmits a high frequency signal whose frequency increases linearly during the measurement phase (called the frequency sweep).
The signal is emitted, reflected from the measuring surface and received with a time delay, t. Delay time, t=2d/c, where d is the distance to the product surface and c is the speed of light in the gas above the product.
For further signal processing the difference Δf is calculated from the actual transmit frequency and the receive frequency. The difference is directly proportional to the distance. A large frequency difference corresponds to a large distance and vice versa.
The frequency difference Δf is transformed via a Fourier transformation (FFT) into a frequency spectrum and then the distance is calculated from the spectrum. The level results from the difference between tank height and measuring distance.
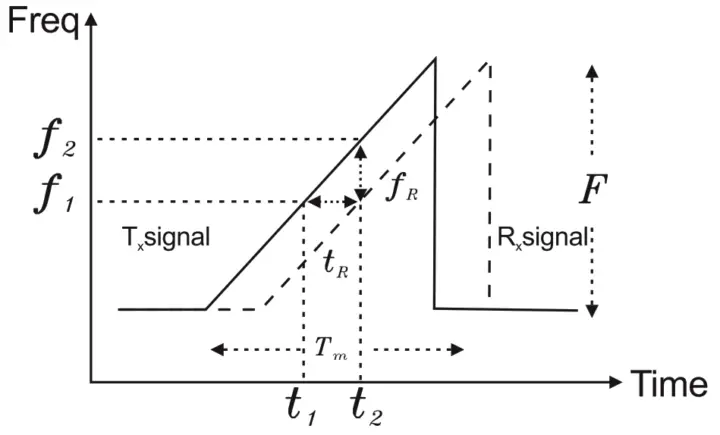
The frequency difference that is processed by Fast Fourier Transformation (FFT) to identify the signal in Intermedium Frequency (IF). This FMCW radar is innate with signal / noise enhancement and filtering of echo-back via Phase-Lock Loop (PLL) circuit that is the best solution for complex environment and high accuracy measurement.
source : FineTek/Krohne





I tink you could improve this article is at least incomplete, regards.