We need to convert sensor raw counts to engineering units in a PLC system.
Convert Raw Counts to Engineering Units

We have a sensor which gives a raw value input of the range 4000 to 20000. We need the sensor value in a output scaled range of 0 to 1450. Find a formula that will allow to calculate the scaled value from the raw one.
I’ll make up an example: I get a raw reading of 12456 from the sensor. How do we convert that to a scaled output value?
Formula
We have an elevated Zero (4000 = 0 Units) so you need to subtract that from the 12456 to start with. The span of your sensor 0 to 1450 units = 16000 (20000 – 4000).
Once the zero is taken care of it’s a simple percentage or ratio calculation.
((Raw Reading – 4000)/16000) x 1450 = Value
(12456 – 4000) = 8456
8456 / 16000 = 0.5285 i.e your reading is 52.85% of the 1450
0.5285 x 1450 = 766.325 units
another way to visualize it.
0% = 4000
25% = 8000
50% = 12000
75% = 16000
100% = 20000
To go from units to the raw value would be the same except you’d need to add the zero (4000) to the ratio.
What would raw value of 725 units be?
((725/1450) x 16000) + 4000
725/1450 = 0.5
0.5 x 16000 = 8000
8000 + 4000 = 12000
Hopefully now you can solve your raw counts calculations using the above formula.
Spare some time to evaluate your skills on the raw count calculations. Using the above example, find-out scaled output for the following raw counts : 15750, 35780, 6854, 24758. You can share the answers using below comments section.
Do you have any other similar formula for the conversion ? Share with us.
If you liked this article, then please subscribe to our YouTube Channel for PLC and SCADA video tutorials.
You can also follow us on Facebook and Twitter to receive daily updates.
Read Next:
- Why 4-20mA Standard is so popular?
- Scaling Sensor Output to Engineering Units
- Raw Count Calculation for Pressure Transmitter



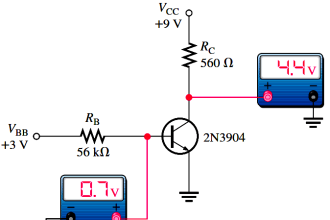





Here is a typical example where a pressure sensor is used to measure 0-500 PSI and the output is 1-5Vdc.
First, using the Y=MX+B formula, we determine what each value is in order to calculate for Y.
X = 4 (since 1-5V has a span of 4 volts. If it was a 0-10Vdc output, X would be 10)
M = 125 (use divide the Units by the Voltage or Current – 0-500/1-5 = 125) which results in PSI/Volts
B = -125 ( since the output starts at 1 volt, there is an offset. We calculated a value of 125 PSI/Volt, therefore, 1V = -125) If the output of the sensor was 0-5Vdc, then there would be no offset.
To test that the values are correct, put them in the equation. 5 volts out should give us 500PSI and 1 volt out should give us 0 PSI.
Y=125(5) + (-125) = 500PSI
Y=125(1) + (-125) = 0 PSI
How can I get the disc of plc
I would mostly agree with Krish’s approach: the y = mx + b (slope-intercept equation) when properly applied yields reliable results for all linear systems, and works the same way without edge cases for elevated or suppressed zero or span so long as the math and arithmetic are carefully applied to properly represent the situation.
Students should also learn to solve this equation for other terms, e.g., if y = mx + b, then b = y – mx for any given value of (x,y) in the range of the equation, and x = (y -b)/m for any given value of (x,y) in the range of the equation.
m, of course is (y2 – y1)/(x2 – x1) for any points (x1, y1) and (x2, y2) in the range of the equation.
Krish’s approach lacks somewhat in mathematical rigor, though: X is not always equal to 4, because it can take on values in the domain of real numbers from 1 to 5, inclusive.
When solving for m, the delta-x would be equal to 4 if x1 = 1 and x2 = 5. In this case, delta-y would necessarily be 500 – 0 or 500. m would thus be equal to 500/4 or 125.
If the order of the (x,y) pairs were reversed, the signs of both delta-x and delta-y would also be reversed and the net result would be the same.