In this article, we will discuss about the Range Finders and its principle. And also, three major types of range finders in today’s world and their function.
Range Finders
Range finders are similar to Proximity sensors only, but a major difference is Proximity sensor is used to detect objects within a short distance whereas Range finders are used to find larger distances to detect obstacles and map the surface of objects.
Range finders are meant to provide advanced information to the system. Mainly Range finders use light to detect the object, it may be visible light, infrared light, laser, or ultrasonic.
Range finders use two common methods of measurement; they are
- Triangulation
- Time of flight.
Triangulation Method
Triangulation involves illuminating the object with a single ray of light that forms a spot on the object. The spot is seen by a receiver such as a photodetector.
The depth of the object is calculated from the triangle formed between the receiver, the light source, and the spot on the object.
This receiver will only detect the spot on the object when the emitter is at a particular angle, which is used to calculate the range.
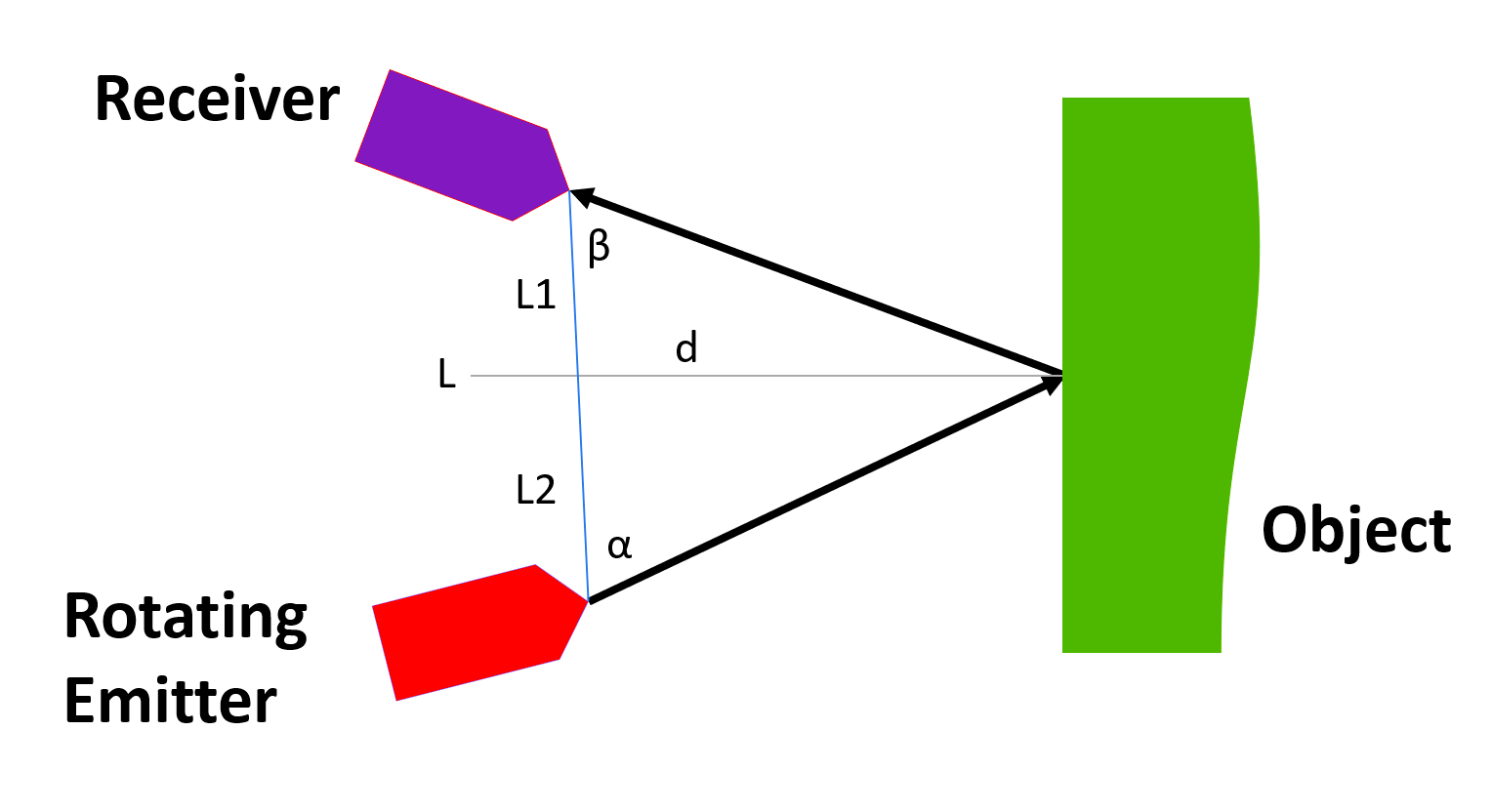
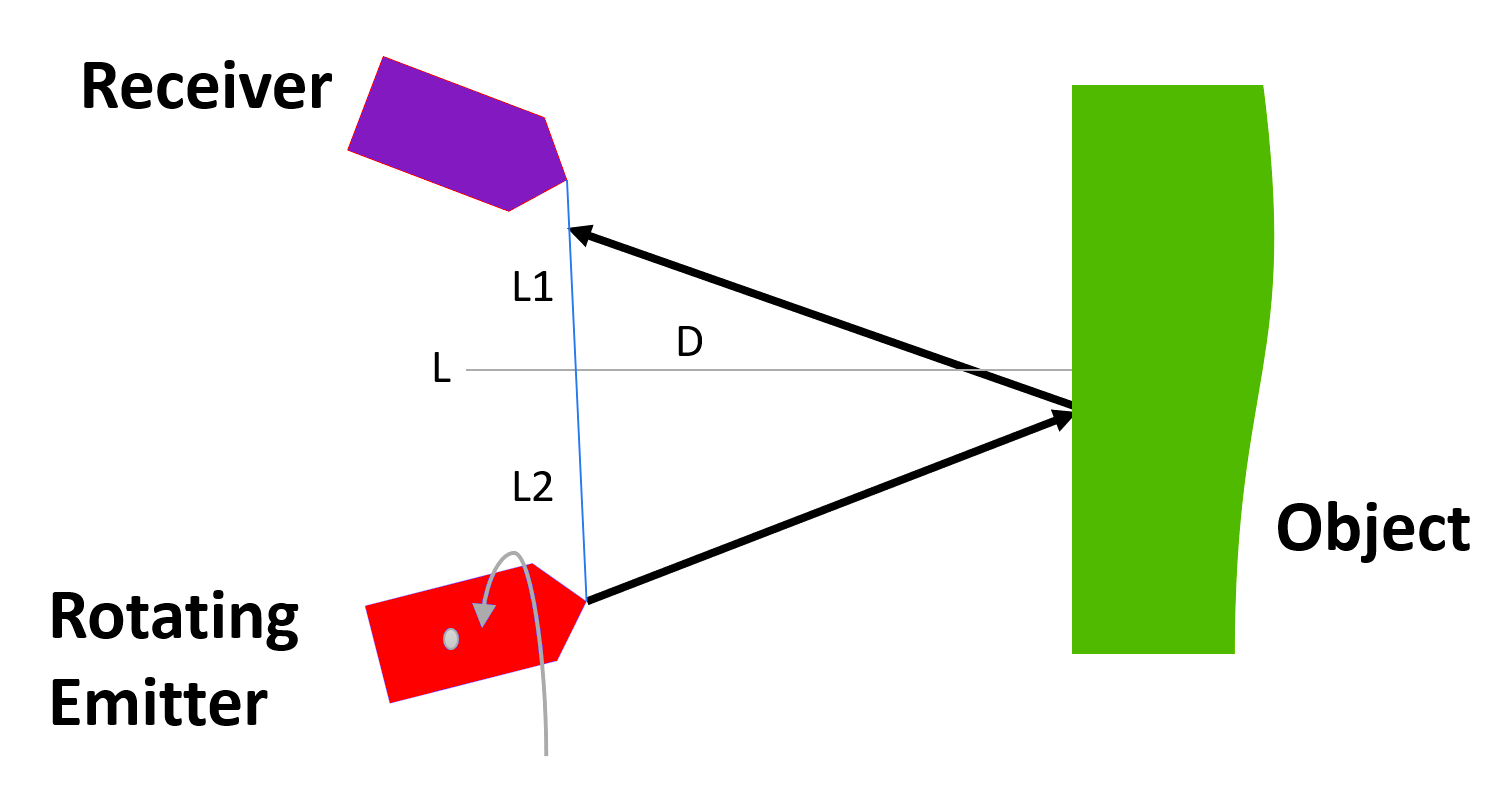
By substituting and manipulating the values we can get the depth of the object.
tan α = d/ L2
tan β = d / L1
We can take L= L1 + L2
Finally, depth can be calculated by, d = L tan α tan β / (tan β + tan α)
Time of Flight Method
Time of Flight ranging consists of sending a signal from the transmitter that bounces back from an object and is received by a receiver.
In this, the distance between the object and the sensor is half the distance traveled by the signal. By knowing the speed of travel, we can calculate the time of flight of the signal measurement.
This time measurement must be very fast to be accurate. For measuring the smaller distance, the wavelength of the signal must be very small.
Types of Range Finders
We use three main methods for finding the range of the object. They are:
- Ultrasonic Range Finders
- Light-Based Range Finders
- Global Positioning systems
Ultrasonic Range Finders
Ultrasonic systems are rugged, simple, inexpensive, and use low-powered systems. They are majorly used in focusing, motion detecting, navigation, and range measurement.
They have certain disadvantages also which is due to the sound’s wavelength, natural variation of temperature and velocity in the medium, and in their maximum range which is limited by the absorption of the ultrasound energy in the medium.
Typically, ultrasonic devices have a frequency of 20kHz to above 2MHz. Most Ultrasonic devices use Time of Flight for measuring the distance of the object. In which, Transducer emits a pulse of High-frequency ultrasound that is reflected back when it encounters a separation in the medium and a receiver that receives the reflected signal.
The distance between the transducer and the object is half the distance travelled which is equal to the time-of-flight times the speed of sound. Thus, the wavelength of the signal, the accuracy of time measurement, and the speed of sound decide the accuracy of the measurement of range.
The speed of the sound in a medium depends on the frequency of the wave, density, and temperature of the medium. For increasing the accuracy of the measurement system, a calibration bar is placed in front of the transducer which is supposed to calibrate the system for varying the temperature. This calibration technique will be only effective if the temperature on the medium is uniform throughout the travelled distance.
Time measurement accuracy is also an important factor for measuring the distance accurately. The worst-case error in time measurement is ±1/2 wavelength if the clock is stopped as soon as the receiver receives the returned signal at a minimum threshold. So, for better accuracy higher frequency ultrasound devices need to be used.
For example, at 200kHZ the wavelengths will be about 0.067 inches (approx.) which yields a minimum worst-case accuracy of 0.034 inches. Cross-correlation, phase comparison, frequency and modulation, and signal integration methods need to be used to increase the resolution and accuracy of ultrasonic devices. Although higher frequencies yield a better resolution, they attenuate much faster than lower-frequency signals which will severely limit their range.
Background noise is another problem with ultrasonic sensors. Many different industrial and manufacturing operations and techniques produce soundwave that contains ultrasonics as high as 100kHz, which can interfere with the operations of the ultrasonic devices.
So, for industrial and manufacturing operations we need to use the ultrasonic device which has a frequency above 100kHz for better and fine functions. For distance measurement, mapping, and flaw detection we can use ultrasonic devices.
Spot checking is the process where we use single point measurement whereas for mapping multiple data point acquisition techniques were used. In the multiple-point method, a large number of distances to different locations on an object are measured.
Light-Based Range Finders
Light (including infrared and laser) based range finders measures the distance from an object by using three different methods. They are direct time delay measurement, indirect amplitude modulation, and triangulation.
The first method, direct time delay measurement measures the time by collimating a beam of light to travel to an object and back, similar to the ultrasonic sensor, mostly it uses laser light for this because it does not divert. This method extremely requires high-speed electronics and high resolutions because it should travel with the speed of light (300000 km/sec) in the air for 30cm in 1ns.
In one indirect method, the time delay is measured by modulating a long burst of light with a low-frequency sinusoidal wave and measuring the phase difference between the emitted light and the backscattered light.
This method by slowing the wave speed to measurable scales by substituting the speed of light with low-speed modulations, but still, it has the advantages of the long travel range of laser lights.
Triangulation is the common technique used in range finding using light beams. This method shows accurate results in shorter distances encountered in navigation. This method is best among these three for the short distance encounters.
LIDAR (Light Detection and Ranging) is similar to radar but uses light instead of radio waves. In this, a beam of light is passed toward the target and the scattered light is used to find the range of the object. For collecting continuous information, a thousand pulses of light are reflected by a rotating mirror on a continuous basis.
For example, a system called Velodyne Lidar which uses a set of 64 laser emitters fires thousands of pulses per second while the unit rotates between 5-15 Hz. It can collect data about the environment at 360 degrees and 27 degrees elevation with a range of 120 meters.
Global Positioning System (GPS)
Global Positioning System is based on the radio-navigation system which was freely available to everyone. Navigation and mapping will be easily determined by this system. We can easily determine Global position and Time with this GPS receiver.
The system includes 29 satellites orbiting the earth, a control and monitoring station on Earth, and the GPS Receiver. The receiver uses the transmitted data from the satellites to calculate its position. This information will be sent directly to the control system of a mobile for positioning purposes.
In this method, at a regular interval, each satellite sends a signal at a precise interval with information about the time the signal was sent and the location of the satellite. This GPS unit reads the signals sent by four satellites and uses the difference between the current time and the time at which the signal was sent.
By this, satellites can calculate the distance. Each distance forms a sphere centered at the satellite on which the GPS unit resides. The intersection between these spheres is the location of the GPS unit.
In theory, signals from only three satellites should suffice. The GPS unit should be able to determine its location relative to three satellites. However, because the signals move at the speed of light, the accuracy of the system is greatly dependent on the accuracy of the GPS unit’s clock.
In the modern world, this GPS can be integrated with robots for positioning and navigation. The position information is fed into the microprocessor which uses it to decide the succeeding actions or motions. Mostly Unmanned vehicles and Electric cars use this system for navigation. This is also widely used in military applications for getting high-performance signals for improved positional accuracy