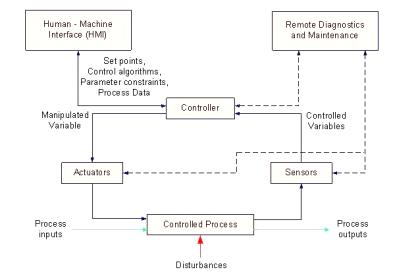
Feedback control
Feedback control is an important technique that is widely used in the process industries.
Its main advantages are as follows.
- Corrective action occurs as soon as the controlled variable deviates from the set point, regardless of the source and type of disturbance.
- Feedback control requires minimal knowledge about the process to be controlled; it particular, a mathematical model of the process is not required, although it can be very useful for control system design.
- The ubiquitous PID controller is both versatile and robust. If process conditions change, retuning the controller usually produces satisfactory control.
However, feedback control also has certain inherent disadvantages:
- No corrective action is taken until after a deviation in the controlled variable occurs. Thus, perfect control, where the controlled variable does not deviate from the set point during disturbance or set-point changes, is theoretically impossible.
- Feedback control does not provide predictive control action to compensate for the effects of known or measurable disturbances.
- It may not be satisfactory for processes with large time constants and/or long time delays. If large and frequent disturbances occur, the process may operate continuously in a transient state and never attain the desired steady state.
- In some situations, the controlled variable cannot be measured on-line, and, consequently, feedback control is not feasible.
Feedforward Control
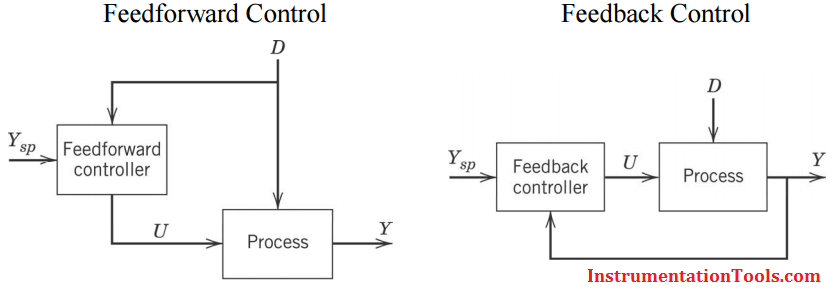
The basic concept of feedforward control is to measure important disturbance variables and take corrective action before they upset the process.
Feedforward control has several disadvantages:
- The disturbance variables must be measured on-line. In many applications, this is not feasible.
- To make effective use of feedforward control, at least an approximate process model should be available. In particular, we need to know how the controlled variable responds to changes in both the disturbance and manipulated variables. The quality of feedforward control depends on the accuracy of the process model.
- Ideal feedforward controllers that are theoretically capable of achieving perfect control may not be physically realizable. Fortunately, practical approximations of these ideal controllers often provide very effective control.
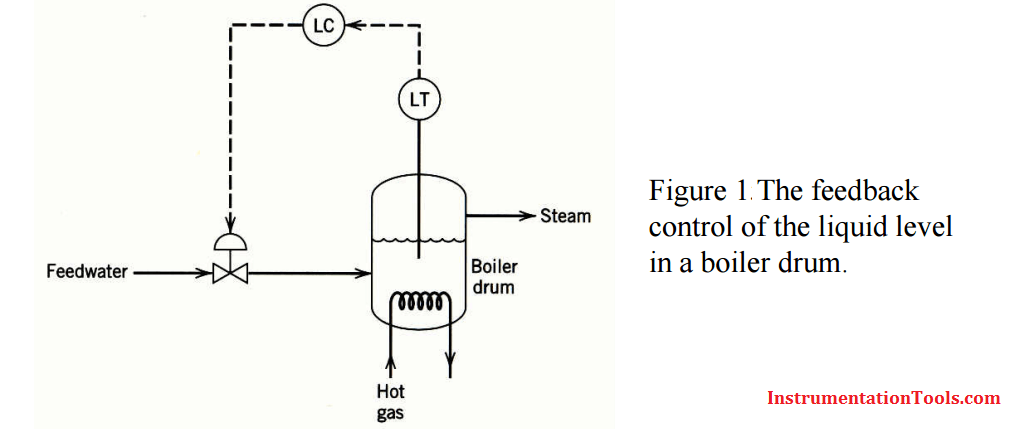
Example:
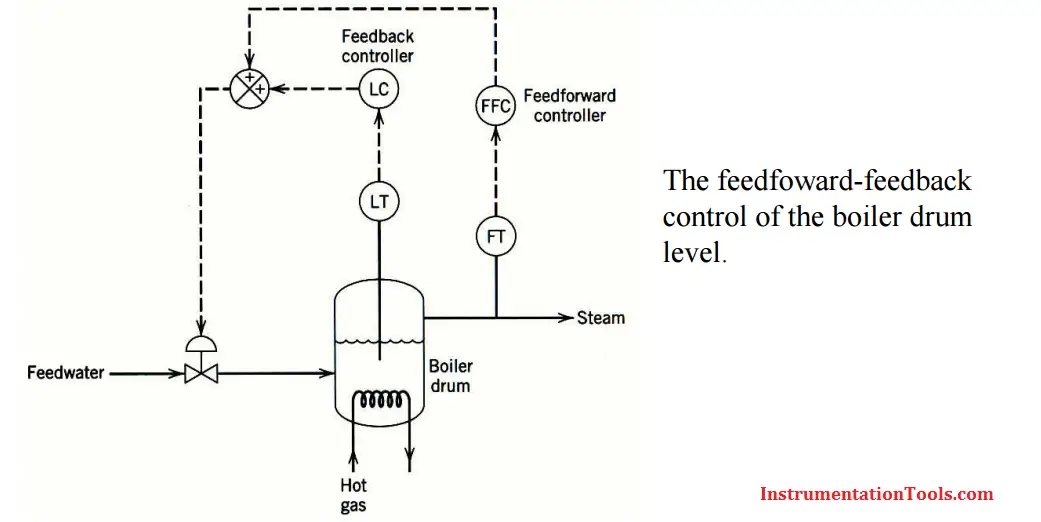
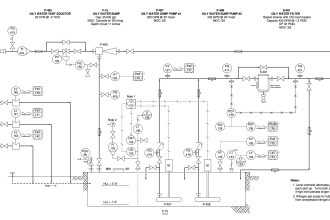
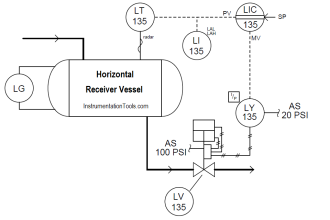
A boiler drum with a conventional feedback control system is shown in Fig.1 The level of the boiling liquid is measured and used to adjust the feedwater flow rate.
This control system tends to be quite sensitive to rapid changes in the disturbance variable, steam flow rate, as a result of the small liquid capacity of the boiler drum. Rapid disturbance changes can occur as a result of steam demands made by downstream processing units.
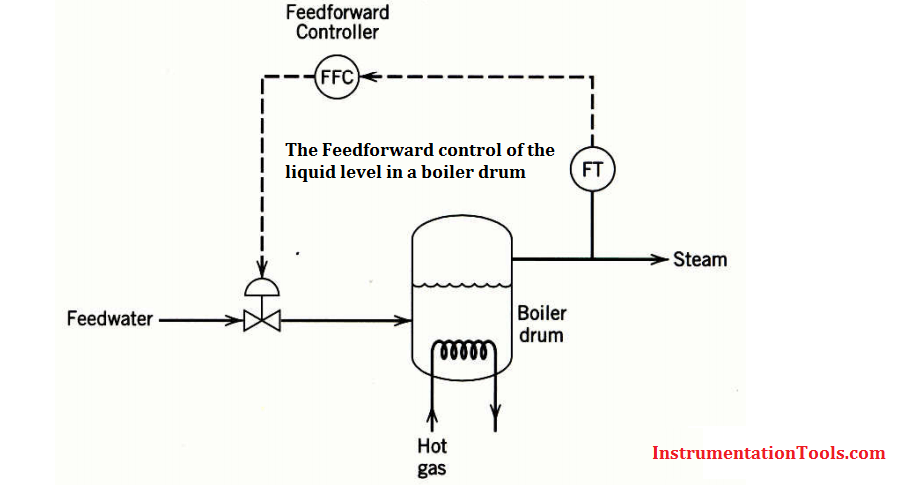
The feedforward control scheme in below Fig can provide better control of the liquid level. Here the steam flow rate is measured, and the feedforward controller adjusts the feedwater flow rate.
In practical applications, feedforward control is normally used in combination with feedback control.
Feedforward control is used to reduce the effects of measurable disturbances, while feedback trim compensates for inaccuracies in the process model, measurement error, and unmeasured disturbances.