Just as devices have been made to measure certain physical quantities and repeat that information in the form of DC electrical signals (thermocouples, strain gauges, pH probes, etc.), special devices have been made that do the same with AC.
It is often necessary to be able to detect and transmit the physical position of mechanical parts via electrical signals. This is especially true in the fields of automated machine tool control and robotics.
Potentiometer
A simple and easy way to do this is with a potentiometer: (Figure below)
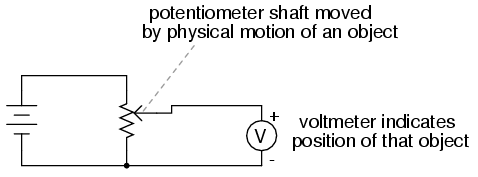
Potentiometer tap voltage indicates position of an object slaved to the shaft.
However, potentiometers have their own unique problems. For one, they rely on physical contact between the “wiper” and the resistance strip, which means they suffer the effects of physical wear over time. As potentiometers wear, their proportional output versus shaft position becomes less and less certain.
You might have already experienced this effect when adjusting the volume control on an old radio: when twisting the knob, you might hear “scratching” sounds coming out of the speakers. Those noises are the result of poor wiper contact in the volume control potentiometer.
Also, this physical contact between wiper and strip creates the possibility of arcing (sparking) between the two as the wiper is moved. With most potentiometer circuits, the current is so low that wiper arcing is negligible, but it is a possibility to be considered.
If the potentiometer is to be operated in an environment where combustible vapor or dust is present, this potential for arcing translates into a potential for an explosion!
LVDT
Using AC instead of DC, we are able to completely avoid sliding contact between parts if we use a variable transformer instead of a potentiometer.
Devices made for this purpose are called LVDT’s, which stands for Linear Variable Differential Transformers. The design of an LVDT looks like this: (Figure below)
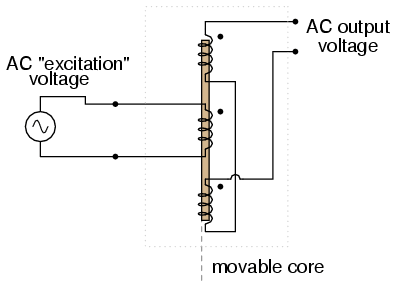
AC output of linear variable differential transformer (LVDT) indicates core position.
Obviously, this device is a transformer: it has a single primary winding powered by an external source of AC voltage, and two secondary windings connected in series-bucking fashion. It is variable because the core is free to move between the windings. It is differential because of the way the two secondary windings are connected.
Being arranged to oppose each other (180o out of phase) means that the output of this device will be the difference between the voltage output of the two secondary windings. When the core is centered and both windings are outputting the same voltage, the net result at the output terminals will be zero volts. It is called linear because the core’s freedom of motion is straight-line.
The AC voltage output by an LVDT indicates the position of the movable core. Zero volts means that the core is centered. The further away the core is from center position, the greater percentage of input (“excitation”) voltage will be seen at the output. The phase of the output voltage relative to the excitation voltage indicates which direction from center the core is offset.
The primary advantage of an LVDT over a potentiometer for position sensing is the absence of physical contact between the moving and stationary parts. The core does not contact the wire windings, but slides in and out within a nonconducting tube. Thus, the LVDT does not “wear” like a potentiometer, nor is there the possibility of creating an arc.
Excitation of the LVDT is typically 10 volts RMS or less, at frequencies ranging from power line to the high audio (20 kHz) range. One potential disadvantage of the LVDT is its response time, which is mostly dependent on the frequency of the AC voltage source. If very quick response times are desired, the frequency must be higher to allow whatever voltage-sensing circuits enough cycles of AC to determine voltage level as the core is moved.
To illustrate the potential problem here, imagine this exaggerated scenario: an LVDT powered by a 60 Hz voltage source, with the core being moved in and out hundreds of times per second. The output of this LVDT wouldn’t even look like a sine wave because the core would be moved throughout its range of motion before the AC source voltage could complete a single cycle! It would be almost impossible to determine instantaneous core position if it moves faster than the instantaneous source voltage does.
RVDT
A variation on the LVDT is the RVDT, or Rotary Variable Differential Transformer. This device works on almost the same principle, except that the core revolves on a shaft instead of moving in a straight line. RVDT’s can be constructed for limited motion of 360o (full-circle) motion.
Synchro
Continuing with this principle, we have what is known as a Synchro or Selsyn, which is a device constructed a lot like a wound-rotor polyphase AC motor or generator. The rotor is free to revolve a full 360o, just like a motor. On the rotor is a single winding connected to a source of AC voltage, much like the primary winding of an LVDT.
The stator windings are usually in the form of a three-phase Y, although synchros with more than three phases have been built. (Figure below) A device with a two-phase stator is known as a resolver. A resolver produces sine and cosine outputs which indicate shaft position.
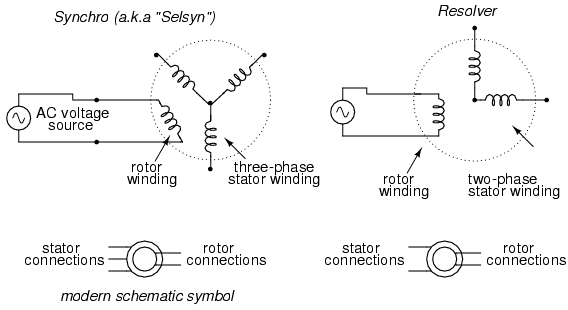
A synchro is wound with a three-phase stator winding, and a rotating field. A resolver has a two-phase stator.
Voltages induced in the stator windings from the rotor’s AC excitation are not phase-shifted by 120o as in a real three-phase generator. If the rotor were energized with DC current rather than AC and the shaft spun continuously, then the voltages would be true three-phase. But this is not how a synchro is designed to be operated.
Rather, this is a position-sensing device much like an RVDT, except that its output signal is much more definite. With the rotor energized by AC, the stator winding voltages will be proportional in magnitude to the angular position of the rotor, phase either 0o or 180o shifted, like a regular LVDT or RVDT.
You could think of it as a transformer with one primary winding and three secondary windings, each secondary winding oriented at a unique angle. As the rotor is slowly turned, each winding in turn will line up directly with the rotor, producing full voltage, while the other windings will produce something less than full voltage.
Synchros are often used in pairs. With their rotors connected in parallel and energized by the same AC voltage source, their shafts will match position to a high degree of accuracy: (Figure below)
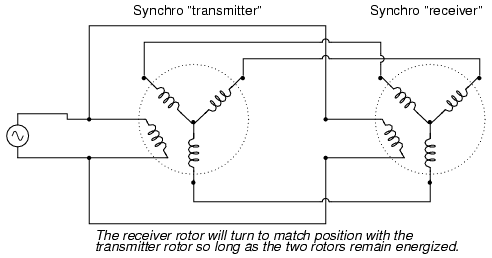
Synchro shafts are slaved to each other. Rotating one moves the other.
Such “transmitter/receiver” pairs have been used on ships to relay rudder position, or to relay navigational gyro position over fairly long distances. The only difference between the “transmitter” and the “receiver” is which one gets turned by an outside force. The “receiver” can just as easily be used as the “transmitter” by forcing its shaft to turn and letting the synchro on the left match position.
If the receiver’s rotor is left unpowered, it will act as a position-error detector, generating an AC voltage at the rotor if the shaft is anything other than 90o or 270o shifted from the shaft position of the transmitter. The receiver rotor will no longer generate any torque and consequently will no longer automatically match position with the transmitter’s: (Figure below)
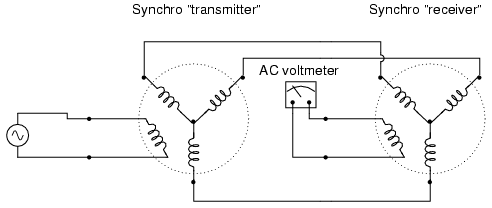
AC voltmeter registers voltage if the receiver rotor is not rotated exactly 90 or 270 degrees from the transmitter rotor.
This can be thought of almost as a sort of bridge circuit that achieves balance only if the receiver shaft is brought to one of two (matching) positions with the transmitter shaft.
One rather ingenious application of the synchro is in the creation of a phase-shifting device, provided that the stator is energized by three-phase AC: (Figure below)
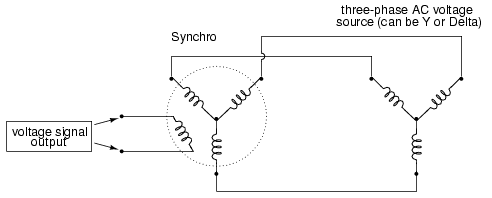
Full rotation of the rotor will smoothly shift the phase from 0o all the way to 360o (back to 0o).
As the synchro’s rotor is turned, the rotor coil will progressively align with each stator coil, their respective magnetic fields being 120o phase-shifted from one another. In between those positions, these phase-shifted fields will mix to produce a rotor voltage somewhere between 0o, 120o, or 240o shift. The practical result is a device capable of providing an infinitely variable-phase AC voltage with the twist of a knob (attached to the rotor shaft).
A synchro or a resolver may measure linear motion if geared with a rack and pinion mechanism. A linear movement of a few inches (or cm) resulting in multiple revolutions of the synchro (resolver) generates a train of sinewaves. An Inductosyn® is a linear version of the resolver. It outputs signals like a resolver; though, it bears slight resemblance.
The Inductosyn consists of two parts: a fixed serpentine winding having a 0.1 in or 2 mm pitch, and a movable winding known as a slider. (Figure below) The slider has a pair of windings having the same pitch as the fixed winding. The slider windings are offset by a quarter pitch so both sine and cosine waves are produced by movement.
One slider winding is adequate for counting pulses, but provides no direction information. The 2-phase windings provide direction information in the phasing of the sine and cosine waves. Movement by one pitch produces a cycle of sine and cosine waves; multiple pitches produce a train of waves.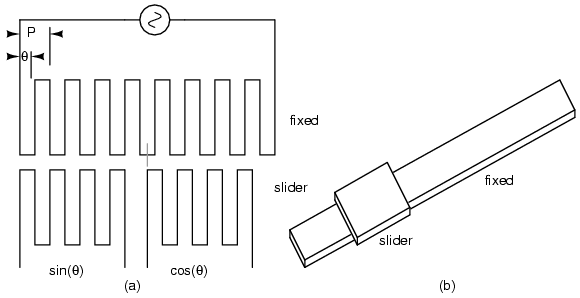
Inductosyn: (a) Fixed serpentine winding, (b) movable slider 2-phase windings.
When we say sine and cosine waves are produces as a function of linear movement, we really mean a high frequency carrier is amplitude modulated as the slider moves. The two slider AC signals must be measured to determine position within a pitch, the fine position. How many pitches has the slider moved? The sine and cosine signals’ relationship does not reveal that.
However, the number of pitches (number of waves) may be counted from a known starting point yielding coarse position. This is an incremental encoder. If absolute position must be known regardless of the starting point, an auxiliary resolver geared for one revolution per length gives a coarse position. This constitutes an absolute encoder.
A linear Inductosyn has a transformer ratio of 100:1. Compare this to the 1:1 ratio for a resolver. A few volts AC excitation into an Inductosyn yields a few millivolts out. This low signal level is converted to to a 12-bit digital format by a resolver to digital converter (RDC). Resolution of 25 microinches is achievable.
There is also a rotary version of the Inductosyn having 360 pattern pitches per revolution. When used with a 12-bit resolver to digital converter, better that 1 arc second resolution is achievable. This is an incremental encoder. Counting of pitches from a known starting point is necessary to determine absolute position. Alternatively, a resolver may determine coarse absolute position.
Capacitive Transducers
So far the transducers discussed have all been of the inductive variety. However, it is possible to make transducers which operate on variable capacitance as well, AC being used to sense the change in capacitance and generate a variable output voltage.
Remember that the capacitance between two conductive surfaces varies with three major factors: the overlapping area of those two surfaces, the distance between them, and the dielectric constant of the material in between the surfaces. If two out of three of these variables can be fixed (stabilized) and the third allowed to vary, then any measurement of capacitance between the surfaces will be solely indicative of changes in that third variable.
Medical researchers have long made use of capacitive sensing to detect physiological changes in living bodies. As early as 1907, a German researcher named H. Cremer placed two metal plates on either side of a beating frog heart and measured the capacitance changes resulting from the heart alternately filling and emptying itself of blood. Similar measurements have been performed on human beings with metal plates placed on the chest and back, recording respiratory and cardiac action by means of capacitance changes.
For more precise capacitive measurements of organ activity, metal probes have been inserted into organs (especially the heart) on the tips of catheter tubes, capacitance being measured between the metal probe and the body of the subject. With a sufficiently high AC excitation frequency and sensitive enough voltage detector, not just the pumping action but also the sounds of the active heart may be readily interpreted.
Like inductive transducers, capacitive transducers can also be made to be self-contained units, unlike the direct physiological examples described above. Some transducers work by making one of the capacitor plates movable, either in such a way as to vary the overlapping area or the distance between the plates.
Other transducers work by moving a dielectric material in and out between two fixed plates: (Figure below)
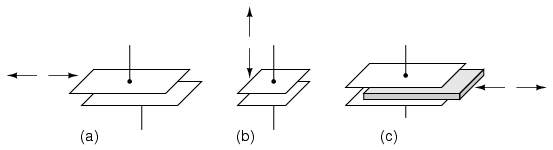
Variable capacitive transducer varies; (a) area of overlap, (b) distance between plates, (c) amount of dielectric between plates.
Transducers with greater sensitivity and immunity to changes in other variables can be obtained by way of differential design, much like the concept behind the LVDT (Linear Variable Differential Transformer).
Differential Capacitive Transducer
Here are a few examples of differential capacitive transducers: (Figure below)

Differential capacitive transducer varies capacitance ratio by changing: (a) area of overlap, (b) distance between plates, (c) dielectric between plates.
As you can see, all of the differential devices shown in the above illustration have three wire connections rather than two: one wire for each of the “end” plates and one for the “common” plate.
As the capacitance between one of the “end” plates and the “common” plate changes, the capacitance between the other “end” plate and the “common” plate is such to change in the opposite direction. This kind of transducer lends itself very well to implementation in a bridge circuit: (Figure below)
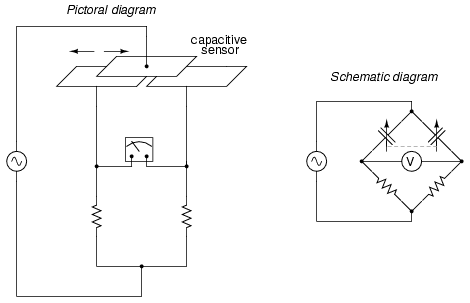
Differential capacitive transducer bridge measurement circuit.
Capacitive transducers provide relatively small capacitances for a measurement circuit to operate with, typically in the picofarad range. Because of this, high power supply frequencies (in the megahertz range!) are usually required to reduce these capacitive reactances to reasonable levels.
Given the small capacitances provided by typical capacitive transducers, stray capacitances have the potential of being major sources of measurement error. Good conductor shielding is essential for reliable and accurate capacitive transducer circuitry!
The bridge circuit is not the only way to effectively interpret the differential capacitance output of such a transducer, but it is one of the simplest to implement and understand. As with the LVDT, the voltage output of the bridge is proportional to the displacement of the transducer action from its center position, and the direction of offset will be indicated by phase shift.
This kind of bridge circuit is similar in function to the kind used with strain gauges: it is not intended to be in a “balanced” condition all the time, but rather the degree of imbalance represents the magnitude of the quantity being measured.
“Twin-T” Transducer
An interesting alternative to the bridge circuit for interpreting differential capacitance is the twin-T. It requires the use of diodes, those “one-way valves” for electric current mentioned earlier in the chapter: (Figure below)
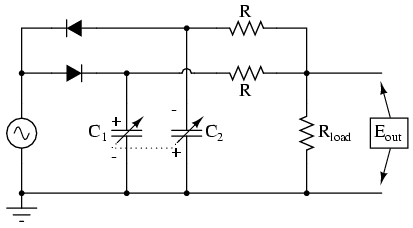
Differential capacitive transducer “Twin-T” measurement circuit.
This circuit might be better understood if re-drawn to resemble more of a bridge configuration: (Figure below)
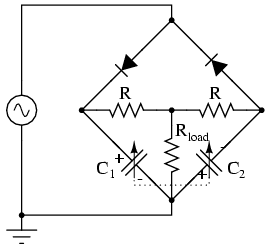
Differential capacitor transducer “Twin-T” measurement circuit redrawn as a bridge.Output is across Rload.
Capacitor C1 is charged by the AC voltage source during every positive half-cycle (positive as measured in reference to the ground point), while C2 is charged during every negative half-cycle. While one capacitor is being charged, the other capacitor discharges (at a slower rate than it was charged) through the three-resistor network. As a consequence, C1 maintains a positive DC voltage with respect to ground, and C2 a negative DC voltage with respect to ground.
If the capacitive transducer is displaced from center position, one capacitor will increase in capacitance while the other will decrease. This has little effect on the peak voltage charge of each capacitor, as there is negligible resistance in the charging current path from source to capacitor, resulting in a very short time constant (τ).
However, when it comes time to discharge through the resistors, the capacitor with the greater capacitance value will hold its charge longer, resulting in a greater average DC voltage over time than the lesser-value capacitor.
The load resistor (Rload), connected at one end to the point between the two equal-value resistors (R) and at the other end to ground, will drop no DC voltage if the two capacitors’ DC voltage charges are equal in magnitude. If, on the other hand, one capacitor maintains a greater DC voltage charge than the other due to a difference in capacitance, the load resistor will drop a voltage proportional to the difference between these voltages. Thus, differential capacitance is translated into a DC voltage across the load resistor.
Across the load resistor, there is both AC and DC voltage present, with only the DC voltage being significant to the difference in capacitance. If desired, a low-pass filter may be added to the output of this circuit to block the AC, leaving only a DC signal to be interpreted by measurement circuitry: (Figure below)
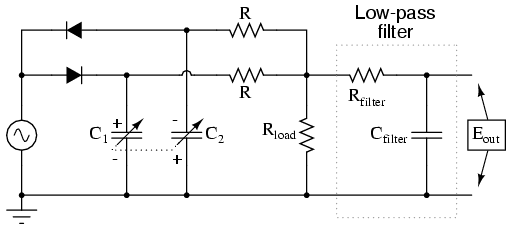
Addition of low-pass filter to “twin-T” feeds pure DC to measurement indicator.
As a measurement circuit for differential capacitive sensors, the twin-T configuration enjoys many advantages over the standard bridge configuration. First and foremost, transducer displacement is indicated by a simple DC voltage, not an AC voltage whose magnitude and phase must be interpreted to tell which capacitance is greater.
Furthermore, given the proper component values and power supply output, this DC output signal may be strong enough to directly drive an electromechanical meter movement, eliminating the need for an amplifier circuit.
Another important advantage is that all important circuit elements have one terminal directly connected to ground: the source, the load resistor, and both capacitors are all ground-referenced. This helps minimize the ill effects of stray capacitance commonly plaguing bridge measurement circuits, likewise eliminating the need for compensatory measures such as the Wagner earth.
This circuit is also easy to specify parts for. Normally, a measurement circuit incorporating complementary diodes requires the selection of “matched” diodes for good accuracy. Not so with this circuit! So long as the power supply voltage is significantly greater than the deviation in voltage drop between the two diodes, the effects of mismatch are minimal and contribute little to measurement error.
Furthermore, supply frequency variations have a relatively low impact on gain (how much output voltage is developed for a given amount of transducer displacement), and square-wave supply voltage works as well as sine-wave, assuming a 50% duty cycle (equal positive and negative half-cycles), of course.
Personal experience with using this circuit has confirmed its impressive performance. Not only is it easy to prototype and test, but its relative insensitivity to stray capacitance and its high output voltage as compared to traditional bridge circuits makes it a very robust alternative.
