PID loops are the backbone of process control, keeping variables like temperature, level, flow, or pressure stable at their setpoints. When a PLC is replaced, even with the same model and program, PID loops that were perfectly stable can start behaving unexpectedly.
PLC PID Loops Oscillate
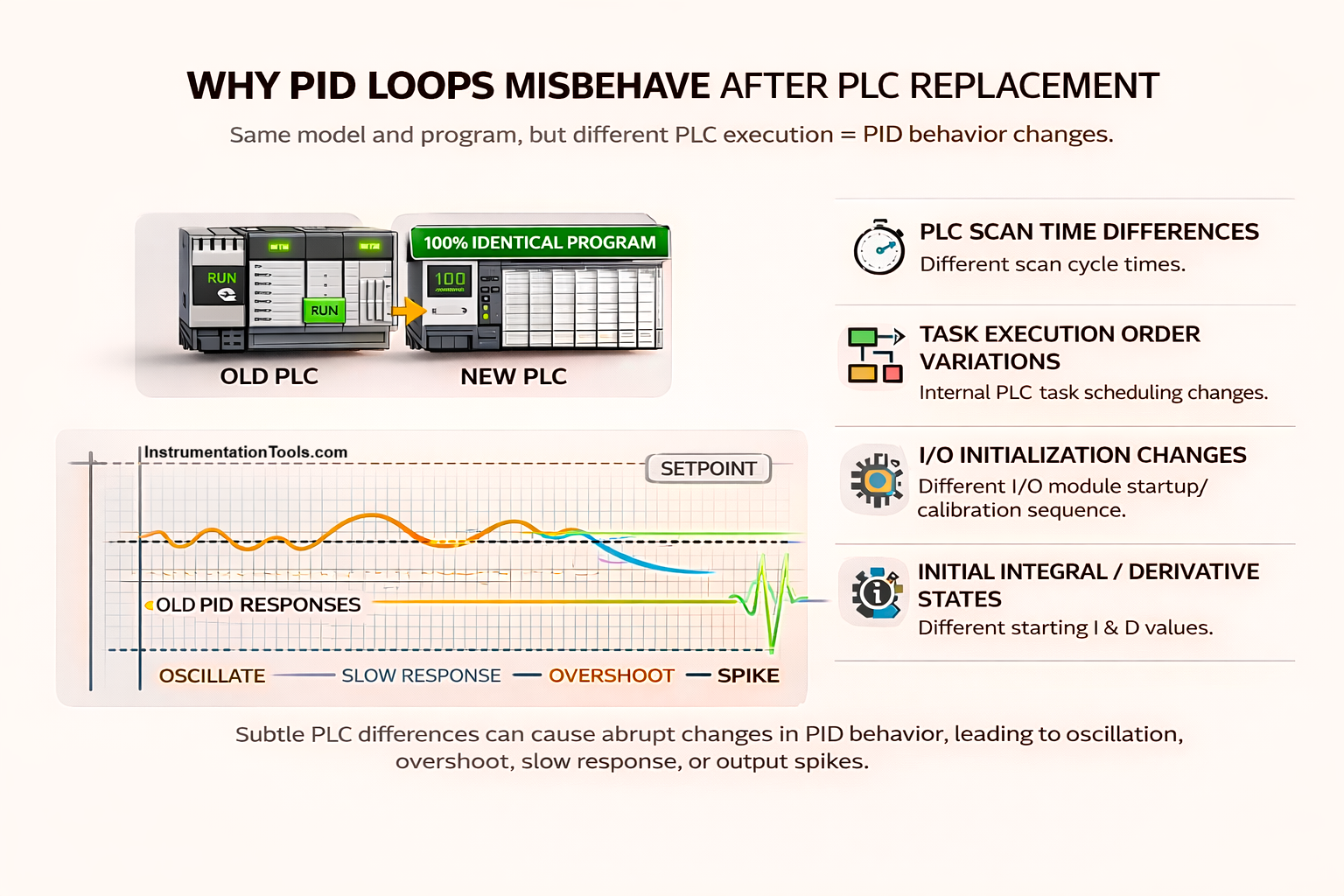
This misbehavior (oscillations) does not mean the process has changed. Instead, it occurs because subtle differences arise during replacement. Even minor variations in scan timing, task execution order, I/O initialization, or the starting state of integral and derivative calculations can change how the PID responds to process deviations, which happens mostly if the PLC firmware is different.
As a result, loops may oscillate, overshoot, respond sluggishly, or produce sudden output spikes. Essentially, a PID loop is not just the parameters you see – it is the combination of logic, timing, and the PLC’s execution environment. Any small difference after replacement can impact its performance, which will be seen in this post.
Change in PLC scan time and task execution
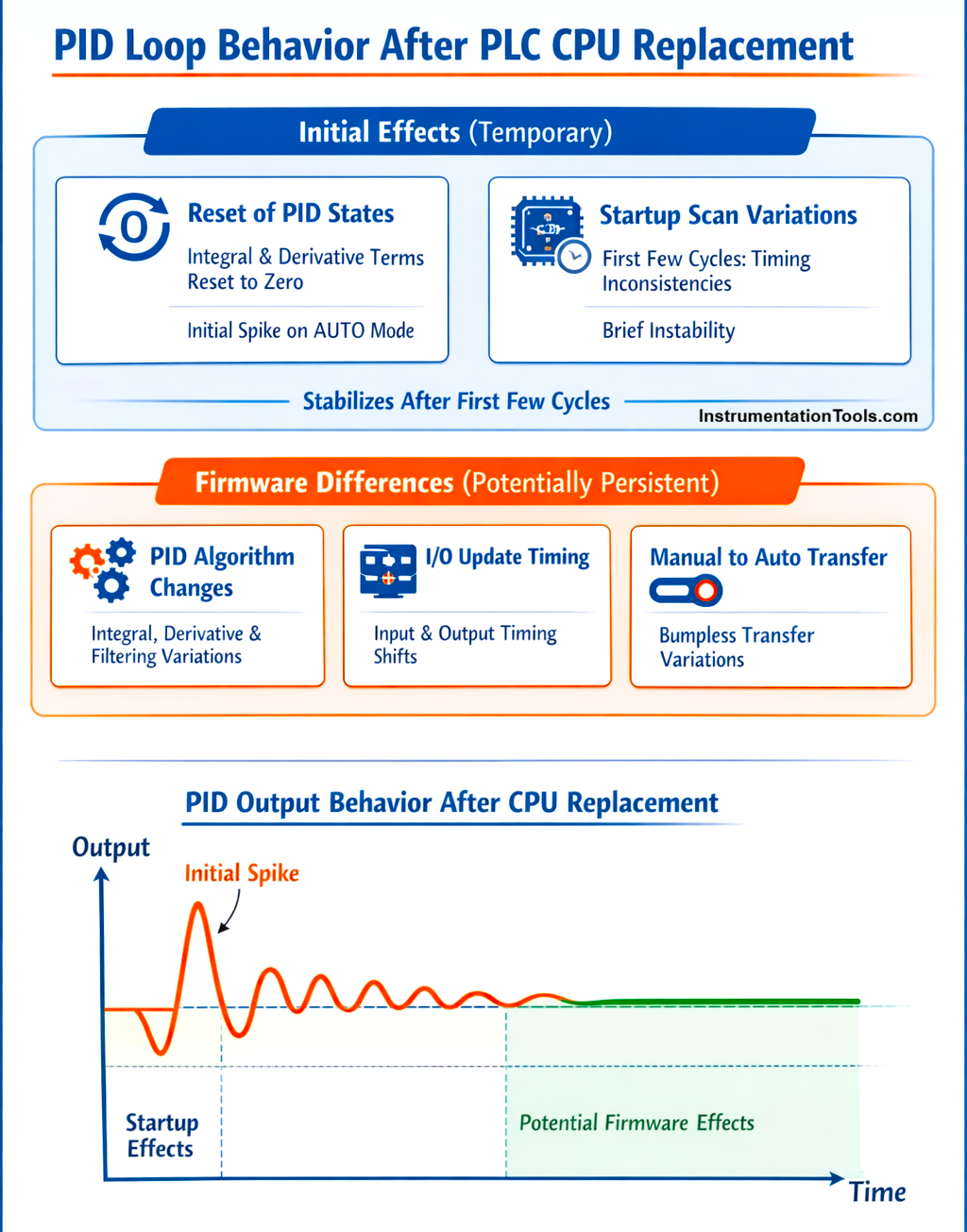
When a PLC is replaced, the scan time and task execution differences may cause the PID to react differently during the first few cycles, especially when the loop switches from MANUAL to AUTO. The integral term starts at zero, the derivative term has no history, and small variations in I/O update timing may create a brief overshoot, oscillation, or output spike.
However, once the PID has been running for a while, the loop settles. The integral starts accumulating error normally, the derivative has proper historical PV data, and task execution stabilizes. After this initial period, the loop behaves just like the old PLC. Most replacement-related PID issues are temporary startup effects. Permanent instability usually indicates other factors (like I/O module faults, wiring issues, or operator intervention), not the replacement itself.
So in practice, be the PLC with the same firmware or a different one:
- Initial startup phase: PID may appear unstable or aggressive.
- Long-term operation: Loop performance becomes stable, assuming tuning is correct, and no other process changes occur.
Differences in the PID algorithm due to the firmware
When a PLC CPU is replaced after a few years, it is very common for the new CPU to run on a different firmware version, even if the hardware model and application program remain exactly the same. This firmware difference alone can cause PID loops to behave differently, sometimes giving the impression that the loop has gone bad after replacement. The reason is that the PID block is not just user logic – it is a firmware-implemented control function, and its internal behavior can evolve between firmware revisions.
PLC manufacturers often refine PID execution over time to improve stability, accuracy, or performance. These refinements may include changes in how the integral term is accumulated, how anti-windup is applied, or how output limiting is handled internally. For example, an older firmware might allow the integral term to continue accumulating error up to the output limit, while a newer firmware may clamp or back-calculate the integral more aggressively. With the same tuning parameters, this change can alter overshoot, settling time, or oscillation characteristics.
Firmware updates may also change how the derivative term is calculated. Some versions calculate derivative action on the process variable, others on control error, or apply different internal filtering to reduce noise sensitivity. Even a small change in derivative filtering can make a previously smooth loop appear noisy or, conversely, make it slower to respond to disturbances. Since derivative action is highly sensitive, these changes are often noticed immediately in fast loops.
Another important aspect is internal filtering and default behavior. Firmware updates sometimes introduce new default filters, modify existing filter coefficients, or change how often internal PID calculations are synchronized with the task scan. Although the user program does not change, the PID may now see a slightly different version of the same process signal, leading to a different control response.
In summary, when a PLC CPU is replaced with a different firmware version, PID loops may misbehave, not because of programming mistakes or hardware faults, but because the internal implementation of the PID algorithm has changed. These effects may persist beyond startup and often require loop verification and minor retuning to restore the original control performance.
Minor I/O update differences caused by firmware changes
When a PLC CPU is replaced, and the firmware version differs from the previous one, even though the I/O modules and wiring remain unchanged, the timing and manner in which I/O data is updated inside the CPU can change. This is a subtle but important effect of firmware updates and can influence PID loop behavior.
Firmware controls how often the CPU reads input data from I/O modules, how this data is buffered, and at what point in the scan cycle it is made available to the user program. In older firmware, analog inputs might be updated strictly at the beginning of the scan, while newer firmware may update them asynchronously or closer to the task execution boundary. Although the physical signal from the field device has not changed, the PID block may now be using a slightly newer or slightly older value of the process variable during each calculation.
For PID loops, especially fast or tightly tuned ones, this small timing shift matters. The derivative term is particularly sensitive because it reacts to the rate of change of the process variable. If the PV is sampled a few milliseconds earlier or later than before, the derivative calculation changes, which can lead to increased noise sensitivity, small oscillations, or a slightly more aggressive response. Even proportional action can appear different if the control error is evaluated at a different moment in the scan.
Firmware updates may also modify how output updates are handled. The control output calculated by the PID might be written to the analog output module at a slightly different point in the scan compared to the old firmware. This changes the effective loop delay – the time between measuring the PV and applying the corrective action. While the change is small, PID loops are highly sensitive to loop delay, and even a few milliseconds can affect stability in fast processes.
In essence, minor I/O update differences caused by firmware are timing-related, not hardware-related. The signals are correct, but the moment at which the PID sees them and reacts to them has shifted slightly. This can make a previously stable loop feel different after CPU replacement, even though the program and I/O hardware are unchanged.