Instrumentation, Electrical, PLC, Tutorials
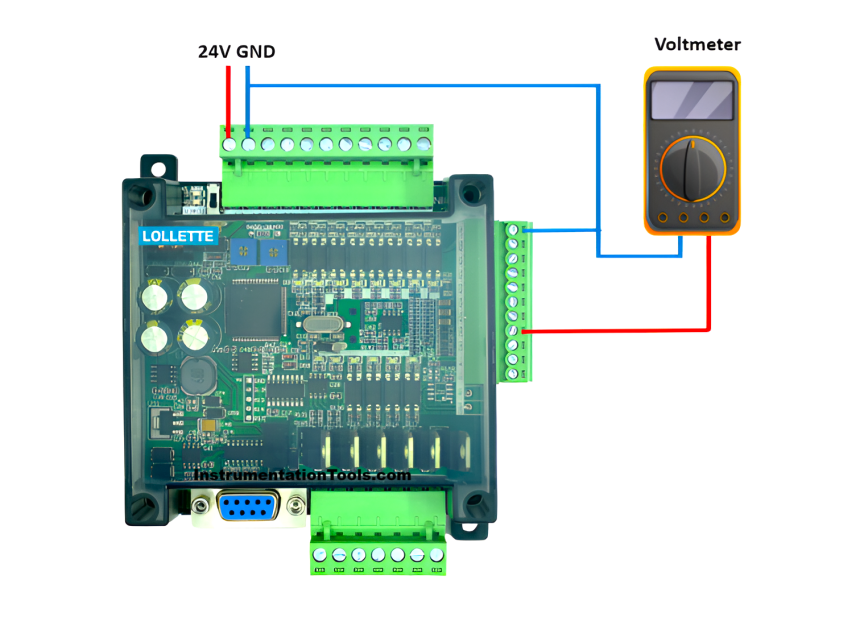
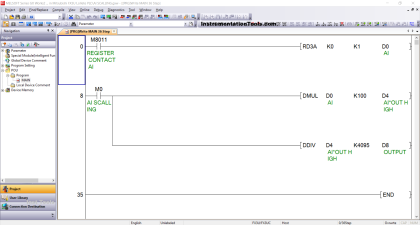
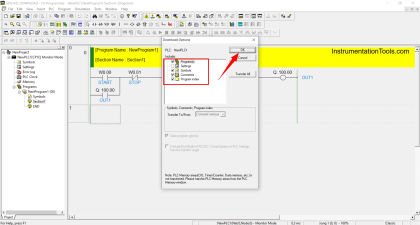
Learn how to use analog output in Mitsubishi FX3U PLC to control external devices with 0–10V or 4–20mA signals with…
Sign in to your account
Remember me