Concept of Stability in Control Systems MCQ
1. Stability of a system implies that :
a) Small changes in the system input does not result in large change in system output
b) Small changes in the system parameters does not result in large change in system output
c) Small changes in the initial conditions does not result in large change in system output
d) All of the above mentioned
Answer: d
Explanation: Stability of the system implies that small changes in the system input, initial conditions, and system parameters does not result in large change in system output.
2. A linear time invariant system is stable if :
a) System in excited by the bounded input, the output is also bounded
b) In the absence of input output tends zero
c) Both a and b
d) System in excited by the bounded input, the output is not bounded
Answer: c
Explanation: A system is stable only if it is BIBO stable and asymptotic stable.
3. Asymptotic stability is concerned with:
a) A system under influence of input
b) A system not under influence of input
c) A system under influence of output
d) A system not under influence of output
Answer: b
Explanation: Asymptotic stability concerns a free system relative to its transient behavior.
4. Bounded input and Bounded output stability notion concerns with :
a) A system under influence of input
b) A system not under influence of input
c) A system under influence of output
d) A system not under influence of output
Answer: a
Explanation: BIBO stability concerns with the system that has input present.
5. If a system is given unbounded input then the system is:
a) Stable
b) Unstable
c) Not defined
d) Linear
Answer: c
Explanation: If the system is given with the unbounded input then nothing can be clarified for the stability of the system.
6. Linear mathematical model applies to :
a) Linear systems
b) Stable systems
c) Unstable systems
d) Non-linear systems
Answer: b
Explanation: As the output exceeds certain magnitude then the linear mathematical model no longer applies.
7. For non-linear systems stability cannot be determined due to:
a) Possible existence of multiple equilibrium states
b) No correspondence between bounded input and bounded output stability and asymptotic stability
c) Output may be bounded for the particular bounded input but may not be bounded for the bounded inputs
d) All of the mentioned
Answer: d
Explanation: For non-linear systems stability cannot be determined as asymptotic stability and BIBO stability concepts cannot be applied, existence of multiple states and unbounded output for many bounded inputs.
8. If the impulse response in absolutely integrable then the system is :
a) Absolutely stable
b) Unstable
c) Linear
d) Stable
Answer: a
Explanation: The impulse response must be absolutely integrable for the system to absolutely stable.
9. The roots of the transfer function do not have any effect on the stability of the system.
a) True
b) False
Answer: b
Explanation: The roots of transfer function also determine the stability of system as they may be real, complex and may have multiplicity of various order.
10. Roots with higher multiplicity on the imaginary axis makes the system :
a) Absolutely stable
b) Unstable
c) Linear
d) Stable
Answer: b
Explanation: Repetitive roots on the imaginary axis makes the system unstable.
11. Roots on the imaginary axis makes the system :
a) Stable
b) Unstable
c) Marginally stable
d) Linear
Answer: c
Explanation: Roots on the imaginary axis makes the system marginally stable.
12. If the roots of the have negative real parts then the response is ____________
a) Stable
b) Unstable
c) Marginally stable
d) Bounded
Answer: d
Explanation: If the roots of the have negative real parts then the response is bounded and eventually decreases to zero.
13. If root of the characteristic equation has positive real part the system is :
a) Stable
b) Unstable
c) Marginally stable
d) Linear
Answer: b
Explanation: The impulse response of the system is infinite when the roots of the characteristic equation has positive real part.
14. A linear system can be classified as :
a) Absolutely stable
b) Conditionally stable
c) Unstable
d) All of the mentioned
Answer: d
Explanation: A system can be stable, unstable and conditionally stable also.
15. ___________ is a quantitative measure of how fast the transients die out in the system.
a) Absolutely stable
b) Conditionally stable
c) Unstable
d) Relative Stability
Answer: d
Explanation: Relative Stability may be measured by relative settling times of each root or pair of roots.
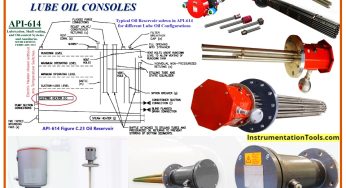
Lube oil consoles of rotary equipment packages in industrial process plants are usually equipped with…
Rotating equipment packages such as pumps, compressors, turbines need the lube oil consoles for their…
This article explains how to blink lights in ladder logic with a detailed explanation video…
In this article, a simple example will teach you the conversion from Boolean algebra to…
In this article, you will learn the PLC cooking timer example for kitchen automation using…
Learn an example PLC program to control a pump based on level sensors using ladder…