Stepper Motor MCQ
Stepper Motor or Step Motor Multiple Choice Questions
How does a Stepper Motor move ?
A. Electrical Pulse
B. Continuous Applied Voltage
C. Alternates from A and B
A pulse can be produce by which means ?
A. Microprocessor
B. Timing Logic
C. Toggle Switch
D. All of the above
Which of the following is not a type of stepper motor?
A. Variable Reluctance
B. Hybrid
C. Magnetic
D. Lead-Screw
Which of the following is not a component of a stepper motor?
A. Windings
B. Rotor and Stator
C. Commutator
D. Brush
E. Both C and D
What is the difference between full-step and half-step?
A. In full-step two phases are on and in half-step only one phase is on.
B. More resonance is evident in half-step
C. More power required for full-step
D. Half-step offers better resolution
What criteria’s are necessary to consider when selecting a stepper motor?
A. Mechanical Motion.
B. Inertial Load
C. Speed Requirements
D. All of the above
Which of the following is NOT an advantage of stepper motors?
A. Cost-efficient
B. Maintenance-free
C. No feedback
D. More complex circuitry
With a stator having 8 teeth and a rotor having 6 teeth, what step angle will an application be able to achieve?
A. 15°
B. 51°
C. 20°
D. 105°
If an application using a stepper motor required feedback, which device would be needed to accomplish this?
A. Counter
B. Encoder
C. Linear Guide
D. Commutator
List industries that use stepper motors in their applications:
- Aircraft
- Automotive
- Chemical
- Consumer Electronics and Office Equipment
- Industrial Medical
- Scientific Instruments
- Surveillance Systems
Explain about Stepper Motor System ?
Stepper Motor Systems
- Open Loop Systems
- Closed Loop Systems
- Servo Systems
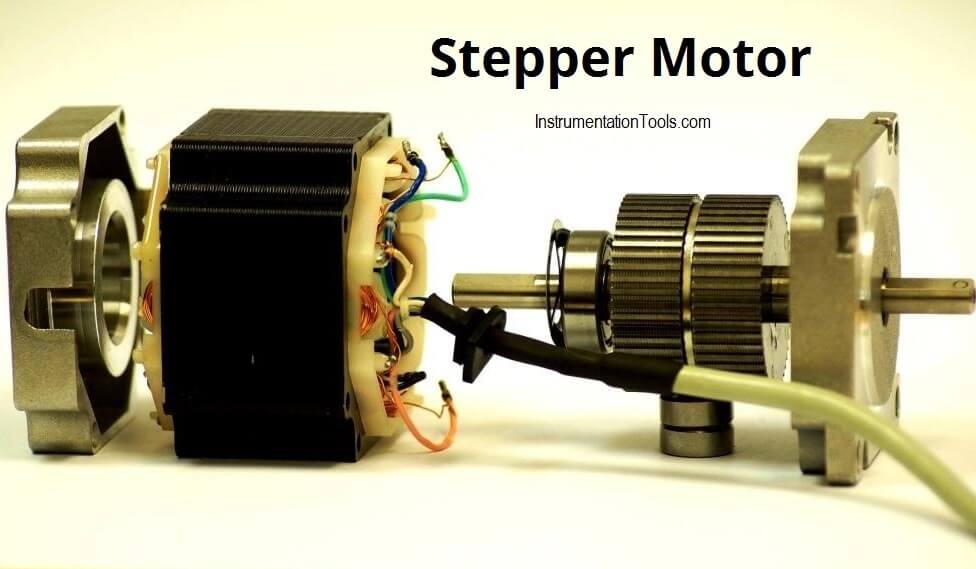
Open Loop
Stepper motors are designed as an open loop system. A pulse generator sends out pulses to the phase sequencing circuit. The phase sequencer determines which phases need to be turned off or on as described in the full step and half step information. The sequencer controls the big power FETs which then turns the motor.
With an open loop system, however, there is no position verification and no way to know if the motor made its commanded move.
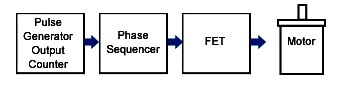
Closed Loop
The most popular method of closing the loop is adding an encoder on the back shaft of a double shafted motor. The encoder is made up of a thin disc with lines on it.
The disc passes between a transmitter and a receiver. Each time a line comes between the two, a pulse is output on the signal lines. These pulses are fed back to the controller which keeps count of them.
Usually, at the end of the move the controller compares the number of pulses sent to the driver with the number of encoder pulses sent back.
A routine is usually written that if the two numbers are different, the difference is then made up. If the numbers are the same, no error has occurred and motion continues.
This method has two drawbacks: cost (and complexity) and response. The additional cost of the encoder, along with the increase in sophistication of the controller add cost to the system. Also, since the correction (if any) is done at the end of the move, additional time could be added into the system.
What are the advantages of Stepper Motor ?
- The rotation angle of the motor is proportional to the input pulse.
- The motor has full torque at standstill (if the windings are energized).
- Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3 to 5% of a step and this error is non-cumulative from one step to the next.
- Excellent response to starting/stopping/reversing.
- Very reliable since there are no contact brushes in the motor. Therefore the life of the step motor is simply dependent on the life of the bearing.
- The stepper motors response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
- It is possible to achieve very low speed synchronous rotation with a load that is directly coupled to the shaft.
- A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses.