Liapunov’s Stability Criterion – Part I
1. If the system is asymptotically stable irrespective that how close or far it is from the origin then the system is:
a) Asymptotically stable
b) Asymptotically stable in the large
c) Stable
d) Unstable
Answer: b
Explanation: For the good control system system must be stable and if the system is asymptotically stable irrespective that how close or far it is from the origin then the system is asymptotically stable in large.
2. A system is said to be locally stable if:
a) The region S (e) is small
b) There exist a real number >0 such that || x (t0) || <=r
c) Every initial state x (t0) results in x (t) tends to zero as t tends to infinity
d) They are unstable
Answer: a
Explanation: By the definition of Liapunov’s stability criteria a system is locally stable if the region of system is very small.
3. The system is asymptotically stable at the origin if :
a) It is stable
b) There exist a real number >0 such that || x (t0) || <=r
c) Every initial state x (t0) results in x (t) tends to zero as t tends to infinity
d) It is unstable
Answer: d
Explanation: By the definition of Liapunov’s stability criteria the system is asymptotically stable at the origin if there exist a real number >0 such that || x (t0) || <=r and every initial state x (t0) results in x (t) tends to zero as t tends to infinity .
4. The system is asymptotically stable in the large at the origin if :
a) It is stable
b) There exist a real number >0 such that || x (t0) || <=r
c) Every initial state x (t0) results in x (t) tends to zero as t tends to infinity
d) Both a and c
Answer: d
Explanation: By the definition of Liapunov’s stability criteria the system is asymptotically stable in the large at the origin if there exist a real number >0 such that || x (t0) || <=r and every initial state x (t0) results in x (t) tends to zero as t tends to infinity.
5. The stability of non-linear systems:
a) Disturbed steady state coming back to its equilibrium state
b) Non-linear systems to be in closed trajectory
c) In limit cycles that is oscillations of the systems
d) All of the mentioned
Answer: d
Explanation: For the stability of non-linear systems as they differ from the linear systems as they have disturbed state coming back to its equilibrium and in closed trajectory and in limit cycles that is oscillations in the system.
6. The direct method of Liapunov is :
a) Concept of energy
b) Relation of stored energy
c) Using the equation of the autonomous systems
d) All of the mentioned
Answer: d
Explanation: Liapunov has two methods as direct and indirect and the direct method of Liapunov is using concept of energy, relation of stored energy and using the equation of the autonomous systems.
7. The results for the energy :
a) Energy of the system is non-negative
b) Energy of the system decreases as t increases
c) Energy is non-negative and decreases as t increases
d) Energy is negative
Answer: c
Explanation: Energy is defined as the work done or force which produces certain displacement and the results for the energy are that energy of the system in non-negative and it decreases as t increases.
8. The visual analogy of the Liapunov energy description is:
a) Ellipse
b) Circle
c) Square
d) Rectangle
Answer: a
Explanation: For the results of the Liapunov energy the loci is traced by the Liapunov energy description and is a ellipse.
9. The idea that the non-negative scalar functions of a system state can also answer the question of stability was given in Liapunov function:
a) True
b) False
Answer: a
Explanation: The stability of the liapunov function can be determined with the help of the scalar functions of a system state.
10. The method of investigating the stability using Liapunov function as the ________________
a) Direct method
b) Indirect method
c) Not determined
d) Always unstable
Answer: a
Explanation: Liapunov’s stability is the major factor of the autonomous functions and it can be determined with the help of the direct method.
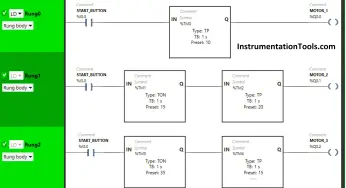
PLC ladder logic design to control 3 motors with toggle switch and explain the program…
VFD simulator download: Master the online tool from the Yaskawa V1000 & programming software for…
The conveyor sorting machine is widely used in the packing industries using the PLC program…
Learn the example of flip-flop PLC program for lamps application using the ladder logic to…
In this article, you will learn the STAR DELTA programming using PLC controller to start…
Lube oil consoles of rotary equipment packages in industrial process plants are usually equipped with…