CANOpen is a very widely used protocol in industrial automation. CANOpen is used in many applications where there are a number of devices requiring to share data with PLC or other controllers. Out of the many protocols used like Ethernet, Modbus, Profinet, Profibus, etc.
CAN Open is one which comes between lower-end protocol and higher-end protocol. When an automation engineer works in CAN Open protocol, it is necessary that he has knowledge of various types of network topologies used in it.
In this post, we will learn the various types of CAN Open network topologies.
The General Architecture of CANOpen Network
Refer to the below image for the first understanding of the basic architecture of CAN Open architecture. A CAN Open connection consists of three wires: CAN_High, CAN_Low, and Can_Ground. The one thing that distinguishes this protocol is the requirement for a terminating resistor.
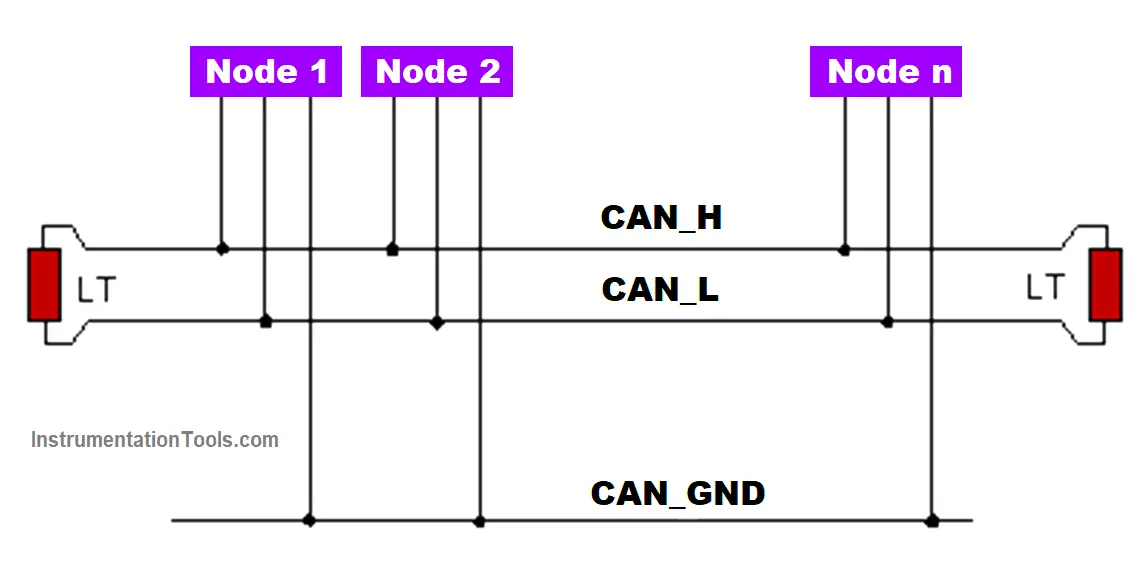
Basically, it needs to understand where it started (Node 1 here in the figure) and where it is ending (Node N here in the figure). So, a resistor is required at both ends as shown in the figure by LT. Without it, the nodes will not communicate with each other. It generally uses twisted pair cables to transmit differential signals.
The resistor value is required at 120 ohms. A separate ground signal is used as a common reference for the CAN-open nodes. One thing must be noted that both the high and low signals must not be shorted with each other. Basically, any of the three connections must not be shorted with each other.
Types of CanOpen Network Topologies
There are three main types of topologies in CANopen communication.
- Basic Topology
- Topology with Repeater
- Bridge Topology
Basic Topology
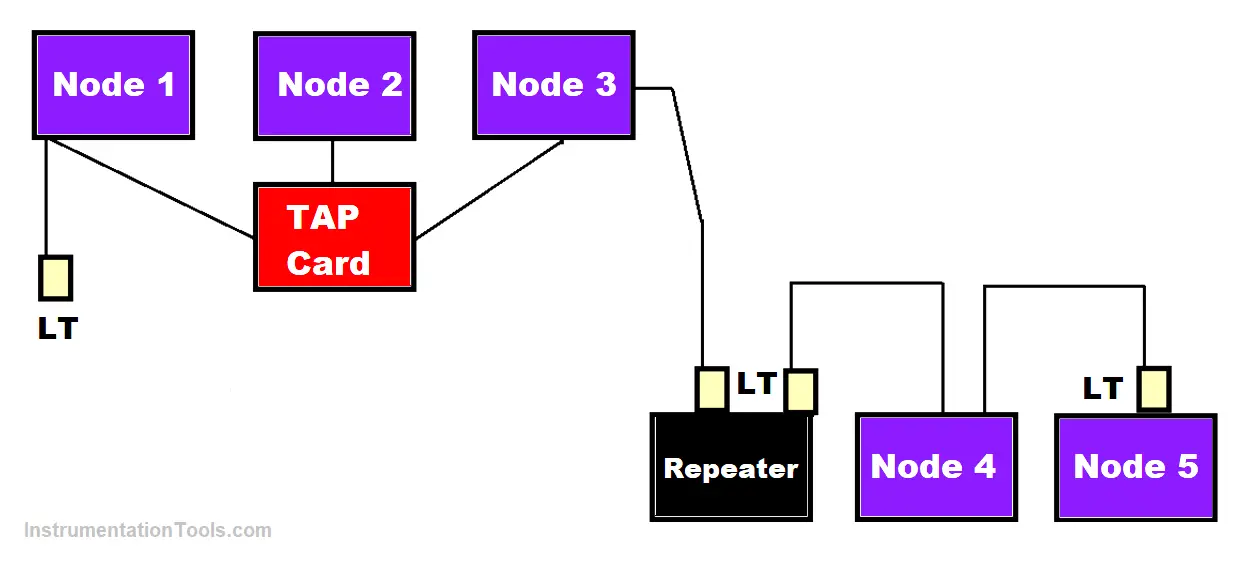
Refer to the below image for understanding the basic topology of CAN Open communication. As seen before, a line termination resistor is used to terminate the connection. In addition to this, a CAN Tap card is also used.

A CAN Tap card forms a partial star topology. This card allows the user to connect all nodes in an interface manner. It nullifies the need to join the nodes by open wires because this card has plug-type ports where you can directly connect the CAN open cable coming from various nodes.
The basic topology also simplifies the system as open and loose wires are always a bad practice to follow in electrical engineering. In order to minimize reflections, keep drop cables as short as possible. The maximum length of drop cables depends on the transmission speed.
Topology with Repeater
The second type comes as repeater topology. The repeater is used as a booster to enable the signals for travelling longer distances. When the distance is longer and the need arises to communicate devices, then a repeater is required in between to amplify the signals.
Due to the repeater, you can easily connect 64 nodes. Also, it provides isolation between groups. So, if one group of nodes fails, then the second group will remain as it is. Also, amplifying here means it simply forwards the signals.
Bridge Topology
The Bridge topology is the same as the repeater topology, but the difference is that in place of the repeater, a bridge comes into the picture. A CAN-open overall network can be separated into more or less independent sub-networks via a CAN bridge.
A bridge provides individual arbitration for each sub-network. Due to this, the main advantage is that each sub-network can be handled separately. A repeater just forwards the signals, but the bridge can create loops of nodes.
Also, each sub-network can have its own transmission speed. It is based on the store- and forward principle, i.e. CAN messages are received by a sub-network and are then forwarded to another sub-network. So, a bridge network allows network size to be increased to a large extent.
In this way, we saw the various network topologies used in Can Open.