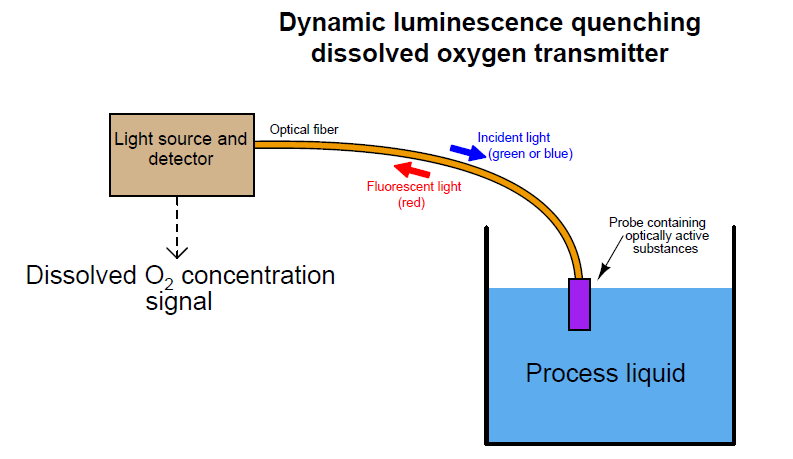
Fiber Optic Sensors
Fiber Optic Sensing Applications Optical fibers find applications beyond electronic data cable replacement, though, which means they will be a growing presence in the field of industrial instrumentation above and…
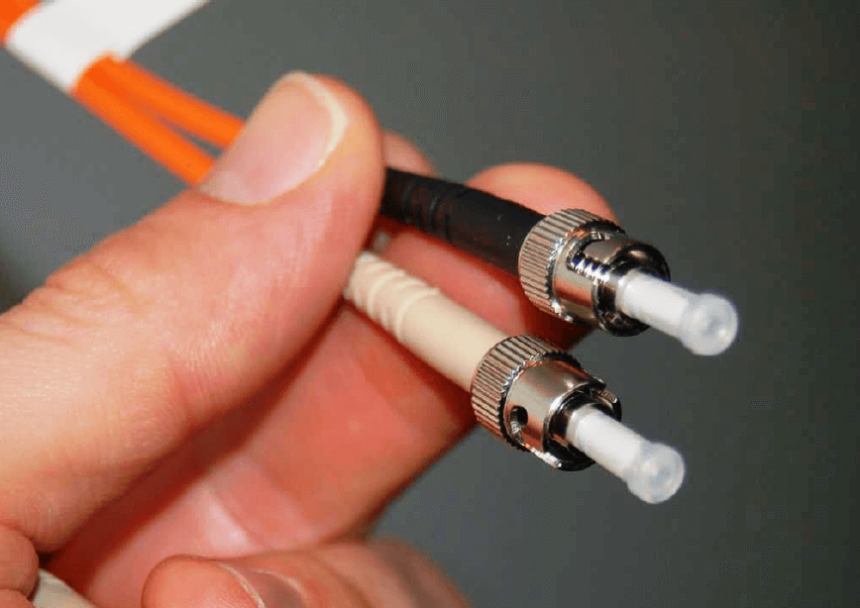
Fiber Optic Cable Construction
Communication-grade optical fibers are manufactured from fused silica (SiO2) glass of exceptional purity. A single strand of optical fiber made from this glass called the “core” serves as a waveguide…
Fiber Optic Data Communication
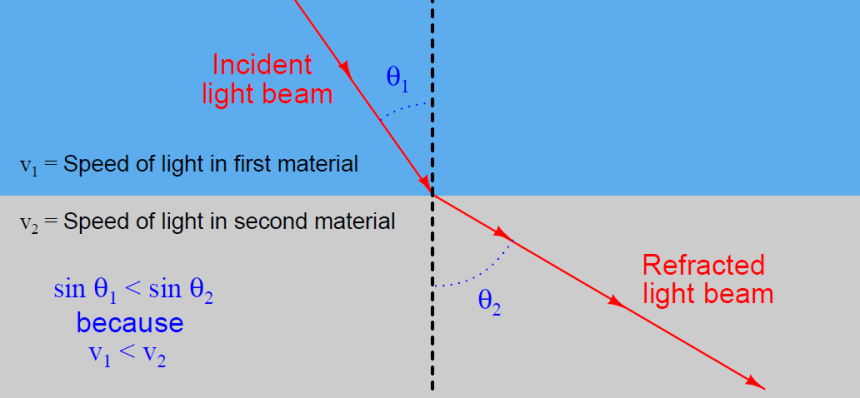
An optical fiber is a “pipe” through which light flows. This is, of course, merely an analogy for how an optical fiber works, but it conveys the basic idea. The…
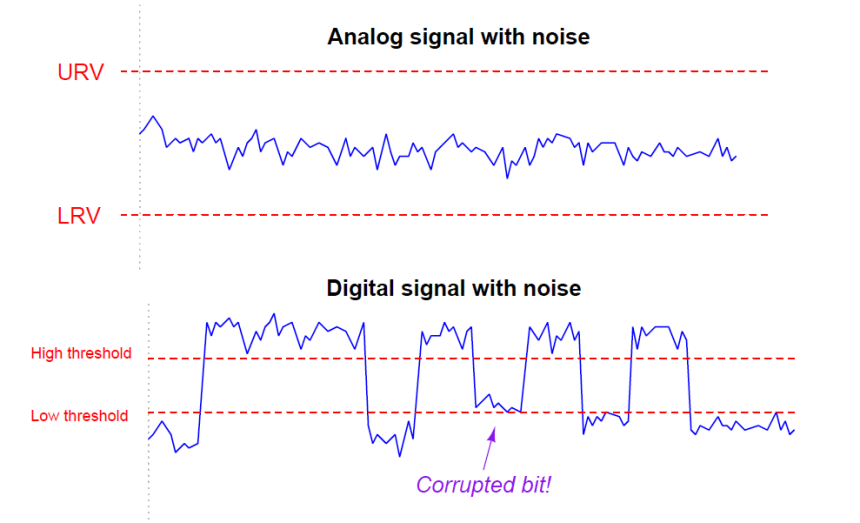
High-frequency Signal Cables
Electronic signals used in traditional instrumentation circuits are either DC or low-frequency AC in nature. Measurement and control values are represented in analog form by these signals, usually by the…
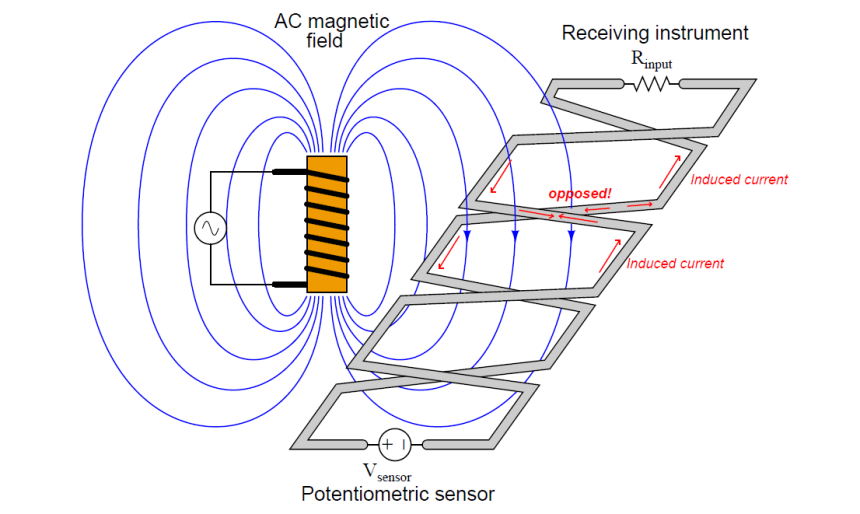
Inductive Coupling Effects
Magnetic fields, unlike electric fields, are exceedingly difficult to completely shield. Magnetic flux lines do not terminate, but rather loop. Thus, one cannot “stop” a magnetic field, only re-direct its…
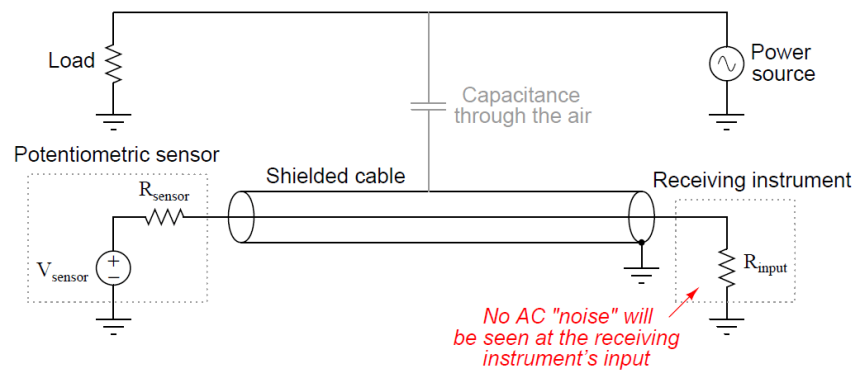
Capacitive Coupling Effects
The fundamental principle invoked in shielding signal conductor(s) from external electric fields is that no substantial electric field can exist within a solid conductor. Electric fields exist due to imbalances…
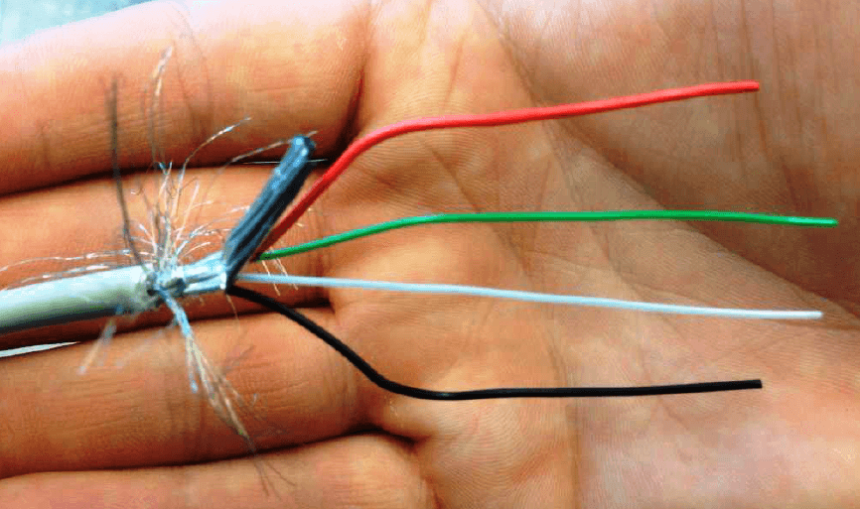
Signal Coupling and Cable Separation
If sets of wires lie too close to one another, electrical signals may “couple” from one wire (or set of wires) to the other(s). This can be especially detrimental to…

Cable Routing
In the interest of safety and longevity, one cannot simply route electrical power and signal cables randomly between different locations. Electrical cables must be properly supported to relieve mechanical stresses…
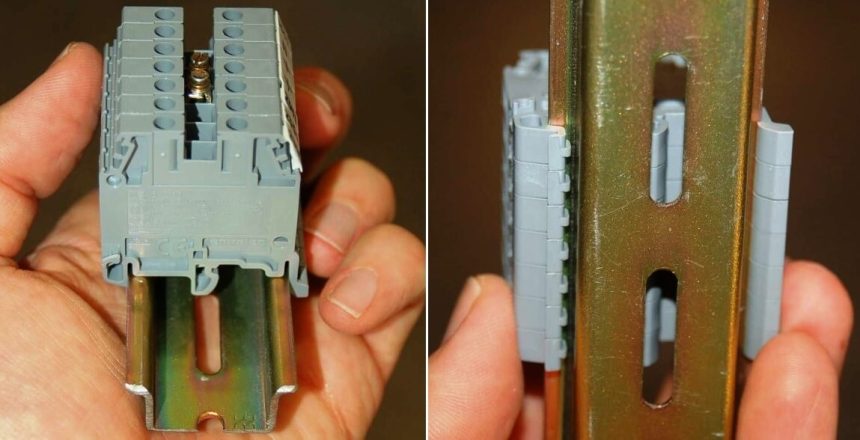
What is DIN rail ?
DIN stands for "Deutsches Institut fur Normung", which means "German Institute for Standardization." In the 1970's the name DIN became the official symbol for technical standardization in Germany. It has become…
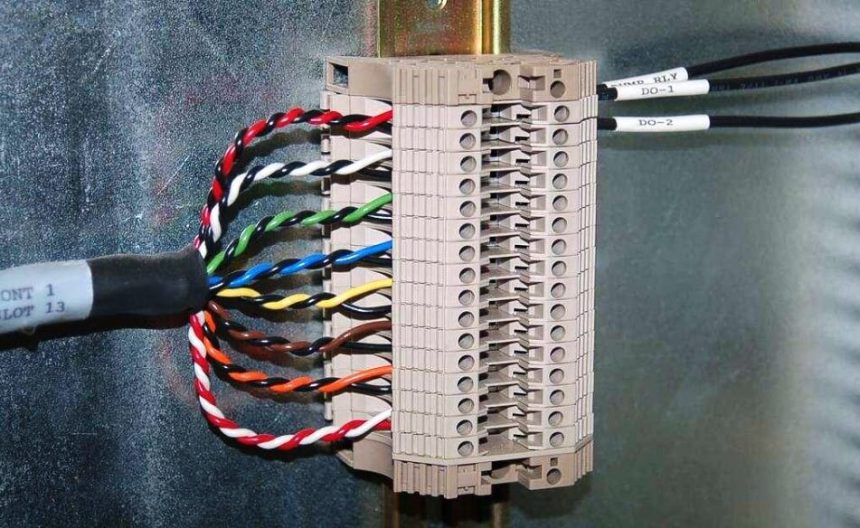
Electrical Signal and Control Wiring
There is much to be said for neatness of assembly in electrical signal wiring. Even though the electrons don’t “care” how neatly the wires are laid in place, human beings…
