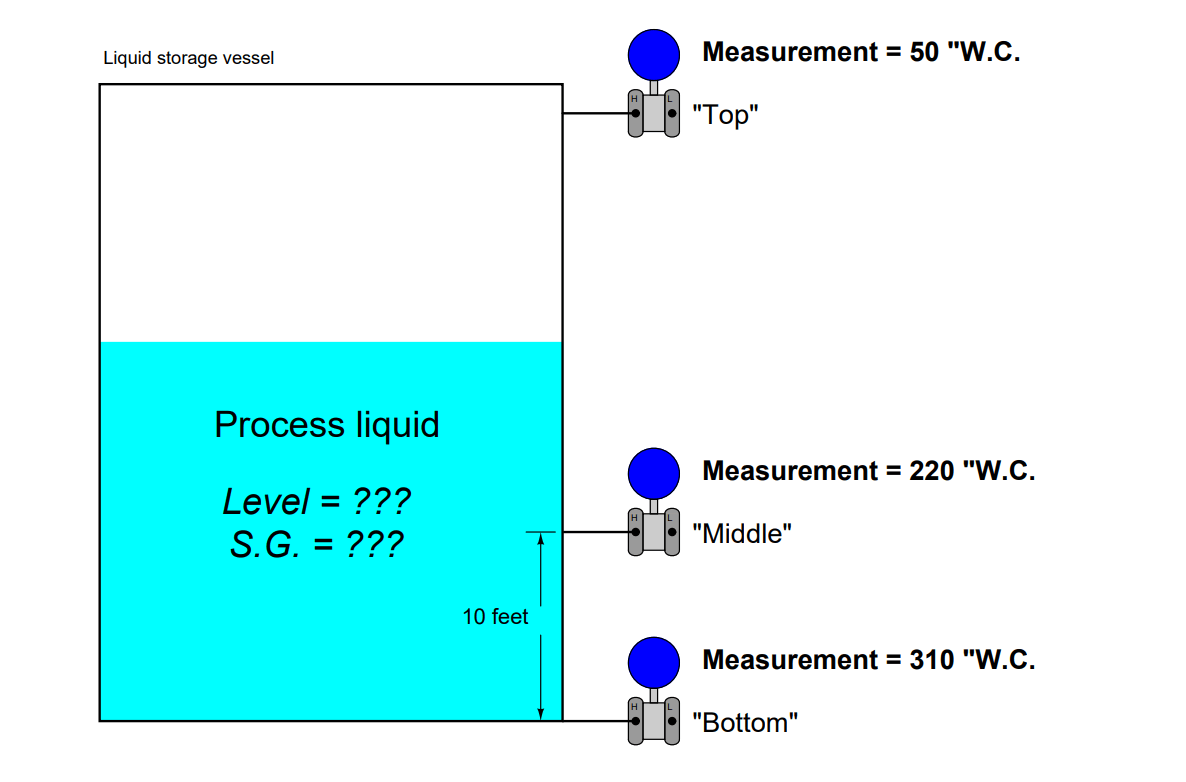
A tank expert system gives the following pressure indications from its three transmitters (top, middle and bottom):
From these pressure measurements, determine the level of liquid in the vessel and its specific gravity.
Also, write mathematical equations for calculating both these parameters given the three pressure sensor measurements.
Answer
The “Top” transmitter’s measurement of 50 inches water column tells us that the vessel is pressurized. This figure will be important to include in our level calculations later.
The difference between “Bottom” and “Middle” pressure transmitter measurements is solely a function of liquid density, since the vertical distance between the two transmitters is fixed and any vapor pressure buildup (50 ”W.C., as indicated by the “Top” transmitter) adds equally to both transmitters’ indications.
In this case, the difference between 310 inches water column and 220 inches water column is 90 inches of water column:
(310 ”W.C.) − (220 ”W.C.) = 90 ”W.C.
If the process liquid were water (S.G. = 1), the pressure difference would be 120 inches of water column, not 90, because the two transmitters are located 10 feet apart from each other.
Thus, the density of this liquid is substantially less than that of water:
Specific gravity = (90 ”W.C. / 120 ”W.C.) = 0.75
To calculate liquid level (height), we must first subtract the measured vapor pressure (50 ”W.C.) from the “Bottom” pressure transmitter’s indication, so that we are left with the pressure due to liquid head alone:
Hydrostatic pressure = (310 ”W.C.) − (50 ”W.C.) = 260 ”W.C.
Dividing this hydrostatic pressure by the specific gravity yields the liquid column height:
(260 ”W.C.)/(0.75 ”W.C. / in) = 346.67 inches or 28.89 feet
Equations for calculating specific gravity and liquid level (let x be the distance between the middle and bottom pressure transmitters in units of inches, and all pressures in units of inches water column):
Specific Gravity = [ Pbottom − Pmiddle ] / (x)
Liquid level = [ Pbottom − Ptop ] / Specific Gravity
Liquid level = (x) { [ Pbottom − Ptop ] / [ Pbottom − Pmiddle ] }
Read Next:
Credits: Tony R. Kuphaldt
The PLC panel and MCC panel interface signals are start, stop, run feedback, trip, local…
In this article, we are going to discuss about shutter door control using induction motor…
Electrical Drives control the motion of electric motors. Motion control is required in industrial and…
PLC ladder logic design to control 3 motors with toggle switch and explain the program…
VFD simulator download: Master the online tool from the Yaskawa V1000 & programming software for…
The conveyor sorting machine is widely used in the packing industries using the PLC program…
