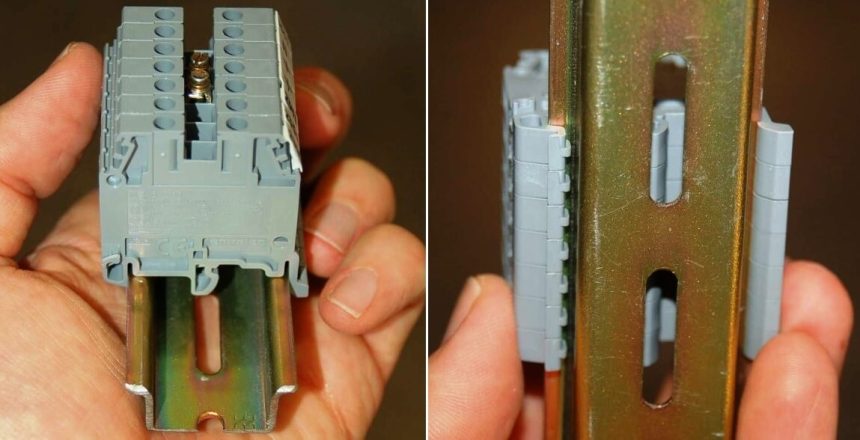
What is DIN rail ?
DIN stands for "Deutsches Institut fur Normung", which means "German Institute for Standardization." In the 1970's the name DIN became the official symbol for technical standardization in Germany. It has become…
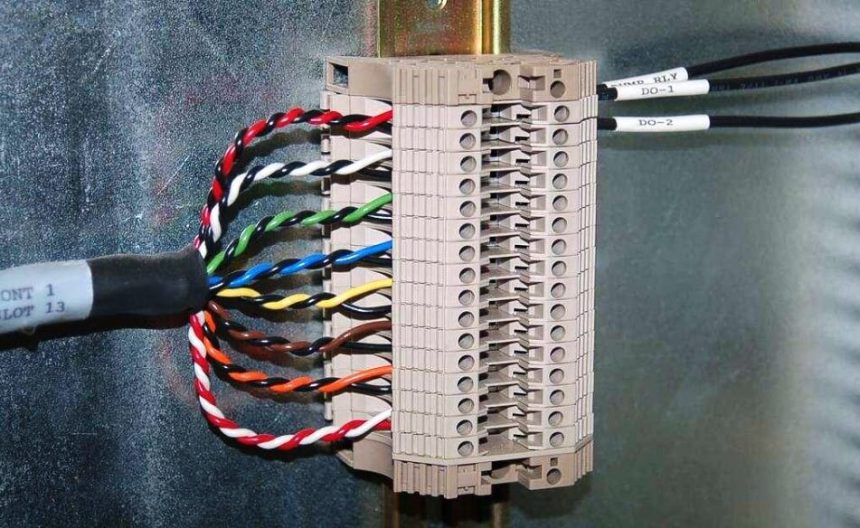
Electrical Signal and Control Wiring
There is much to be said for neatness of assembly in electrical signal wiring. Even though the electrons don’t “care” how neatly the wires are laid in place, human beings…

Instrument Tube Bending
Tube bending is something of an art, especially when done with stainless steel tubing. It is truly magnificent to see a professionally-crafted array of stainless steel instrument tubes, all bends…

Sanitary Pipe Fittings for the Instruments
Food processing, pharmaceuticals manufacturing, and biological research processes are naturally sensitive to the presence of micro-organisms such as bacteria, fungi, and algae. It is important in these processes to ensure…

Tube and tube fittings
Tube, like pipe, is a hollow structure designed to provide an enclosed pathway for fluids to flow. In the case of tubing, it is usually manufactured from rolled or extruded…
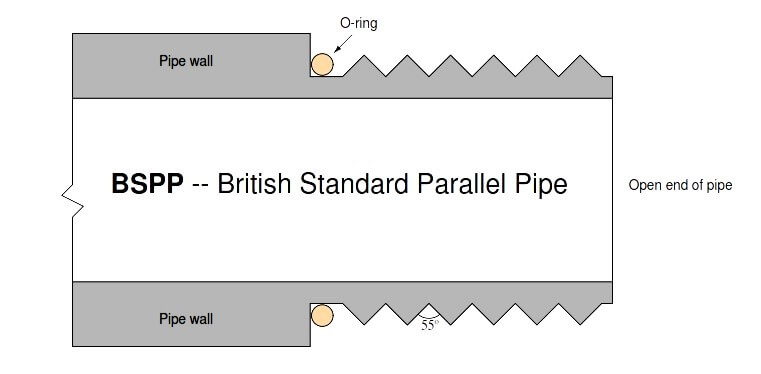
What is Parallel Thread Pipe Fittings ?
An alternative to tapered threads in pipe joints is the use of parallel threads, similar to the threads of machine screws and bolts. Since parallel threads are incapable of forming…
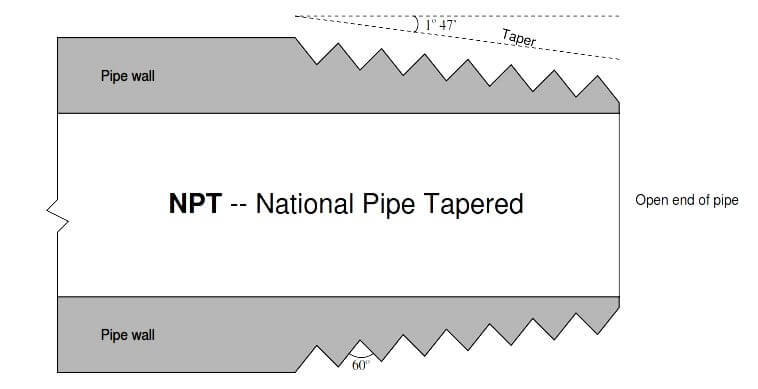
What is Tapered Thread Pipe Fittings ?
For smaller pipe sizes, threaded fittings are more commonly used to create connections between pipes and between pipes and equipment (including some instruments). A very common design of threaded pipe…
Power Systems MCQ Series 22
In this MCQ you can learn and practice Power Systems Gate questions and answers to test your knowledge of electrical engineering.
Power Systems MCQ Series 21
In this MCQ you can learn and practice Power Systems objective quiz questions to test your knowledge of electrical engineering.
Power Systems MCQ Series 20
In this MCQ you can learn and practice Power Systems objective quiz questions to test your knowledge of electrical engineering.
