Stability of Nonlinear System – II
1. In a control system integral error compensation _______steady state error
a) Increases
b) Minimizes
c) Does not have any effect on steady state error
d) All of the mentioned
Answer: b
Explanation: Integral compensation is the phase lag compensation as it reduces or minimizes the steady state error by not affecting the damping factor but reducing the natural frequency.
2. With feedback _____ reduces.
a) System stability
b) System gain
c) System stability and gain
d) Damping
Answer: b
Explanation: With feedback damping increases and system gain reduces as they are inversely proportional to each other and for the good control system the speed of response must be high with low gain and oscillations.
3. An amplidyne can give which of the following characteristics?
a) Constant current
b) Constant voltage
c) Constant current as well as constant voltage
d) Constant current, constant voltage and constant power
Answer: d
Explanation: An amplidyne is the device so constructed so as can give constant current, voltage and power and it is the important device as single device can achieve all these features.
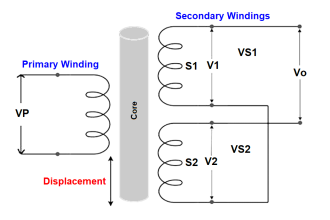
4. Which of the following cannot be measured by LVDT?
a) Displacement
b) Velocity
c) Acceleration
d) Pressure
Answer: d
Explanation: LVDT is the linear variable differential transformer and it is an inductive transformer and can measure displacement, velocity and acceleration but pressure cannot be measured by using LVDT.
5. __________directly converts temperature into voltage.
a) Thermocouple
b) Potentiometer
c) Gear train
d) LVDT
Answer: a
Explanation: Among all the instruments Thermocouple is the instrument that has two different metals with different temperatures and the difference in temperature is converted into the potential difference.
6. The transfer function technique is considered as inadequate under which of the following conditions?
a) Systems having complexities and nonlinearities
b) Systems having stability problems
c) Systems having multiple input disturbances
d) All of the mentioned
Answer: d
Explanation: State variable analysis is used as Transfer function approach cannot be practically used in the systems having complexities, nonlinearities, stability problems and multiple input.
7. Which of the following is the output of a thermocouple?
a) Alternating current
b) Direct current
c) A.C. voltage
d) D.C. voltage
Answer: d
Explanation: Thermocouple is the instrument that has two different metals with different temperatures and the difference in temperature is converted into the potential difference and gives output in D.C. Voltage.
8. A.C. servomotor is basically a
a) Universal motor
b) Single phase induction motor
c) Two phase induction motor
d) Three phase induction motor
Answer: c
Explanation: A.C. Servomotor is the servomotor in which the input is mainly the alternating current and is basically two phase induction motor.
9. The first order control system, which is well designed, has a
a) Small bandwidth
b) Negative time constant
c) Large negative transfer function pole
d) None of the mentioned
Answer: c
Explanation: The first order control system which is the system with maximum one root which can be at origin and has well designed large negative transfer function pole.
10. Which of the following is exhibited by Root locus diagrams?
a) The poles of the transfer function for a set of parameter values
b) The bandwidth of the system
c) The response of a system to a step input
d) The frequency response of a system
Answer: a
Explanation: Root locus diagrams is constructed by the locus traced by the gain of the system with the varying frequency and have the poles of the transfer function for a set of parameter values.