Power Systems MCQ Series 17
In this MCQ you can learn and practice power system analysis objective quiz questions to test your knowledge of electric power systems.
Power Systems MCQ Series 16
In this MCQ you can learn and practice Power Systems online quiz questions to test your knowledge of electrical power systems.
Power Systems MCQ Series 15
In this MCQ you can learn and practice Power Systems objective quiz questions to test your knowledge of electrical power systems.
Power Systems MCQ Series 14
In this MCQ you can learn and practice Power Systems GATE exam questions to test your knowledge of electrical engineering.
Power Systems MCQ Series 13
In this MCQ you can learn and practice Power Systems GATE objective quiz questions to test your knowledge of electrical power systems.
Power Systems MCQ Series 12
In this MCQ you can learn and practice Power Systems GATE objective quiz questions to test your knowledge of electrical power systems.
Power Systems MCQ Series 11
In this MCQ you can learn and practice Power Systems mock test questions to check your knowledge of electrical power systems.
Power Systems MCQ Series 10
In this MCQ you can learn and practice Power Systems objective quiz questions to test your knowledge of electrical power systems.
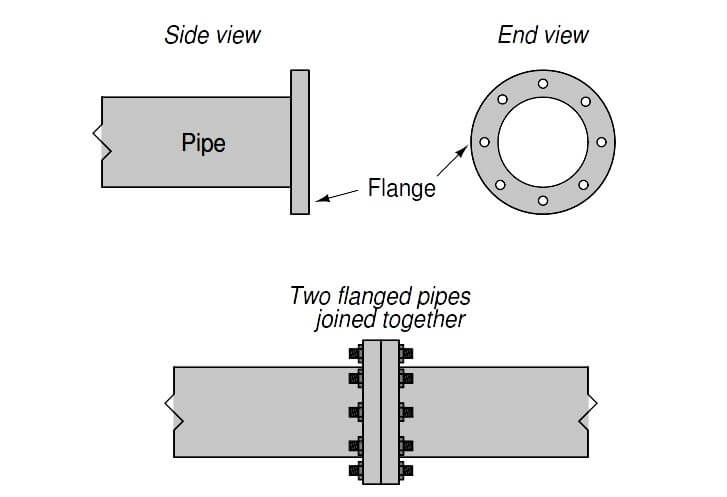
What is Flanged Pipe Fittings ?
A pipe “flange” is a ring of metal, usually welded to the end of a pipe, with holes drilled in it parallel to the pipe center line to accept several…
Power Systems MCQ Series 9
In this MCQ you can learn and practice Power Systems objective quiz series to test your knowledge of electrical power systems.
