Courses
Automation
PLC
Control System
Safety System
Communication
Fire & Gas System
Instrumentation
Design
Pressure
Temperature
Flow
Level
Vibration
Analyzer
Control Valve
Switch
Calibration
Erection & Commissioning
Interview
Instrumentation
Electrical
Electronics
Practical
Q&A
Instrumentation
Control System
Electrical
Electronics
Analog Electronics
Digital Electronics
Power Electronics
Microprocessor
Request
Search
Books
Software
Projects
Process
Tools
Basics
Formula
Power Plant
Root Cause Analysis
Electrical Basics
Animation
Standards
Courses
Design
PLC
Interview
Control System
Search
Courses
Automation
PLC
Control System
Safety System
Communication
Fire & Gas System
Instrumentation
Design
Pressure
Temperature
Flow
Level
Vibration
Analyzer
Control Valve
Switch
Calibration
Erection & Commissioning
Interview
Instrumentation
Electrical
Electronics
Practical
Q&A
Instrumentation
Control System
Electrical
Electronics
Analog Electronics
Digital Electronics
Power Electronics
Microprocessor
Request
Follow US
Tag:
Advantages of PID Controller
Comparison of Proportional Integral Derivative Controllers (PID)
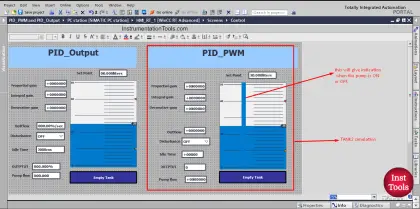
PID Controller Output Types – PID_PWM and PID_Output
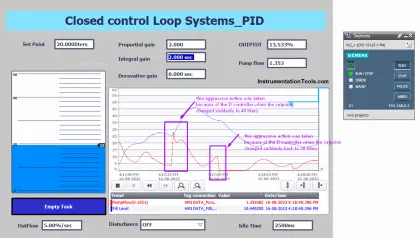
PID Controllers in Closed Loop Control Systems – PLC Basics
How to Select the Right Type of Controller
Welcome Back!
Sign in to your account
Username or Email Address
Password
Remember me
Lost your password?