Robotic Control System – Part II MCQ
1. An automatic apparatus or device that performs functions ordinarily ascribed to humans or operate with what appears to be almost human intelligence is called ________
a) Robot
b) Human
c) Animals
d) Reptiles
Answer: a
Explanation: Robot is an automatic apparatus or device that performs functions ordinarily ascribed to humans or operate with what appears to be almost human intelligence.
2. The laws of Robotics are:
a) A robot may not injure a human being
b) A robot must abbey the order given by human except when conflict with the first law
c) A robot must protect its own existence except when it is violating first and second law
d) Both b and c
Answer: d
Explanation: A robot may not injure a human being or through in action, allow human being to be harmed.
3. The basic components of robot are:
a) The mechanical linkage
b) Sensors and controllers
c) User interface and power conversion unit
d) All of the mentioned
Answer: d
Explanation: The basic components of robot are the mechanical linkage, sensors and controllers, User interface and power conversion unit.
4. Assertion (A): Degree of freedom is defined as the number of variables to define motion in the body in space.
Reason (R): Maximum degree of freedom can be six in a robot.
a) Both A and R are true and R is not correct explanation of A.
b) Both A and R are true but R is not correct explanation of A.
c) A is true but R is false
d) A is false but R is true
Answer: b
Explanation: Degree of freedom defines the variables responsible for the motion of the robot and allows robot to reach all positions and orientations.
5. A _________ is connection between parts or links in a robot that allow motion.
a) Hinge
b) Joint
c) Dis joint
d) None of the mentioned
Answer: b
Explanation: A joint is connection between parts or links in a robot that allow motion. It has translator and rotatory motion.
6. Classification of Robot is based on:
a) Geometry and geometric classification
b) Left right classification
c) Based on control system
d) All of the mentioned
Answer: d
Explanation: Robots can be classified on the basis of the movement their structure and geometry as humanoid robots and gantry robots.
7. Assertion (A): The control system of an industrial robot determine its flexibility and efficiency, within the limits set beforehand by the design of the mechanical structure.
Reason (R): The control system provides a logical sequence for the robot to follow.
a) Both A and R are true and R is not correct explanation of A.
b) Both A and R are true but R is not correct explanation of A.
c) A is true but R is false
d) A is false but R is true
Answer: a
Explanation: The system provides the theoretical position values for each step and continuously measures the actual position during movement.
8. Hierarchical level control involves :
a) Level 1: Actuator control controls individual robot actuators
b) Level 2: Path control coordinates robot path movement
c) Level 3: Main control high level instruction interpreter
d) All of the mentioned
Answer: d
Explanation: Hierarchy refers to the system where some form of levels are used as higher to lower or vice versa and this level control mainly involves actuator control, path control and main control for various functioning of the parts of the robot.
9. Non servo robots are also called as:
a) Pick and place
b) Fixed stop robot
c) Both of the mentioned
d) None of the mentioned
Answer: c
Explanation: Non servo robots are simplest robots as they are the least complex structures and they are made to do some specific and less jobs and it is an open loop system.
10. Characteristics of non-servo robot are:
a) Relatively inexpensive compared to servo robots
b) Simple, understand and operate
c) Precise and reliable
d) Closed loop system.
Answer: d
Explanation: Non-servo robots are open loop system and less costly and they are less complex and can be used once or twice for some work and they are less reliable.
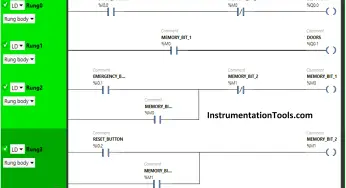
In the PLC emergency stop example program, when the emergency button is pressed, the elevator…
This article is about controlling the double-acting pneumatic cylinder movement control with a timer circuit.
In this article, we will review the main responsibility scopes of the instrumentation and electrical…
Learn the daily alarm PLC program using real-time clock instruction as per the required timings…
A Real-Time Clock accurately tracks time from seconds to years and stores the data in…
Omron PLC logic for sorting the number of products and counting the number of products…