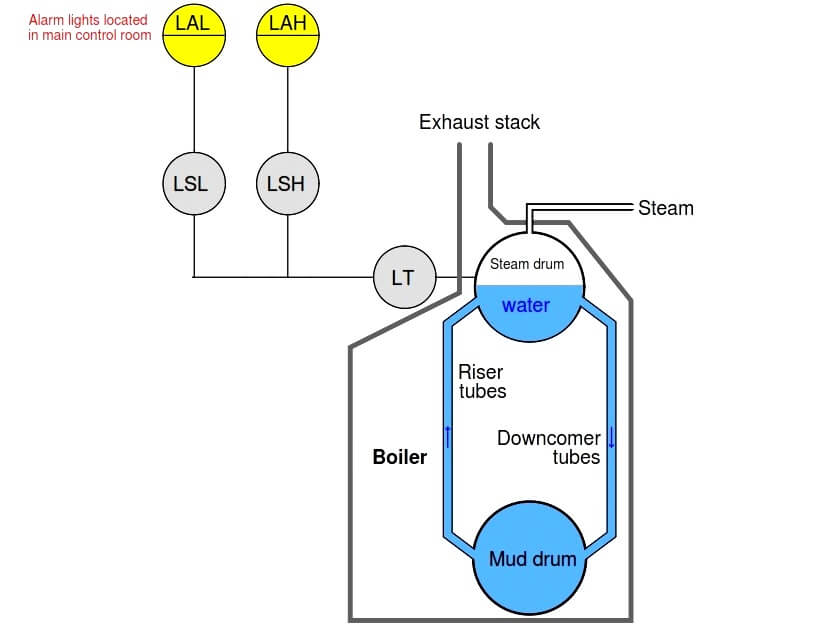
Process Switches and Alarms
Another type of instrument commonly seen in measurement and control systems is the process switches. The purpose of a switch is to turn on and off a device like heaters,…
Autotransformers
In this MCQ you can learn and practice Autotransformers objective quiz questions to test your knowledge on electrical machines.
Three Phase Transformers
In this MCQ you can learn and practice Three Phase Transformers objective quiz questions to test your knowledge on electrical machines.
Transformer Losses and Efficiency
In this MCQ you can learn and practice Transformer Losses and Efficiency objective quiz questions to test your knowledge on electrical machines.
Transformer Open Circuit and Short Circuit Test
In this MCQ you can learn and practice Transformer Open Circuit and Short Circuit Test objective quiz questions to test your knowledge on electrical machines.
Transformer Construction
In this MCQ you can learn and practice Transformer Construction objective quiz questions to test your knowledge on electrical machines.
Voltage Regulation of Transformer
In this MCQ you can learn and practice Voltage Regulation of Transformer objective quiz questions to test your knowledge on electrical machines.
Equivalent Circuit of Transformer
In this MCQ you can learn and practice Equivalent Circuit of Transformer objective quiz questions to test your knowledge on electrical machines.
Transformer as a Magnetically Coupled Circuit
In this MCQ you can learn and practice Transformer as a Magnetically Coupled Circuit objective quiz questions to test your knowledge on electrical machines.
Parallel Operation of Single Phase Transformers
In this MCQ you can learn and practice Parallel Operation of Single Phase Transformers objective quiz questions to test your knowledge on electrical machines.
